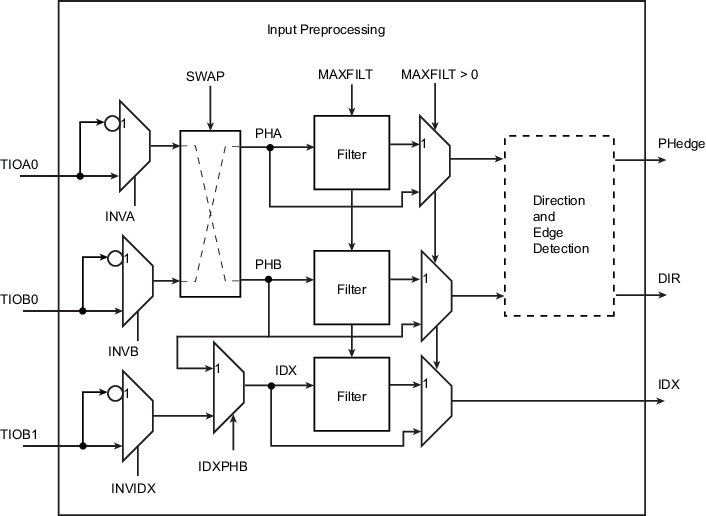
Input preprocessing consists of capabilities to take into account rotary sensor factors such as polarities and phase definition followed by configurable digital filtering.
Each input can be negated and swapping PHA, PHB is also configurable.
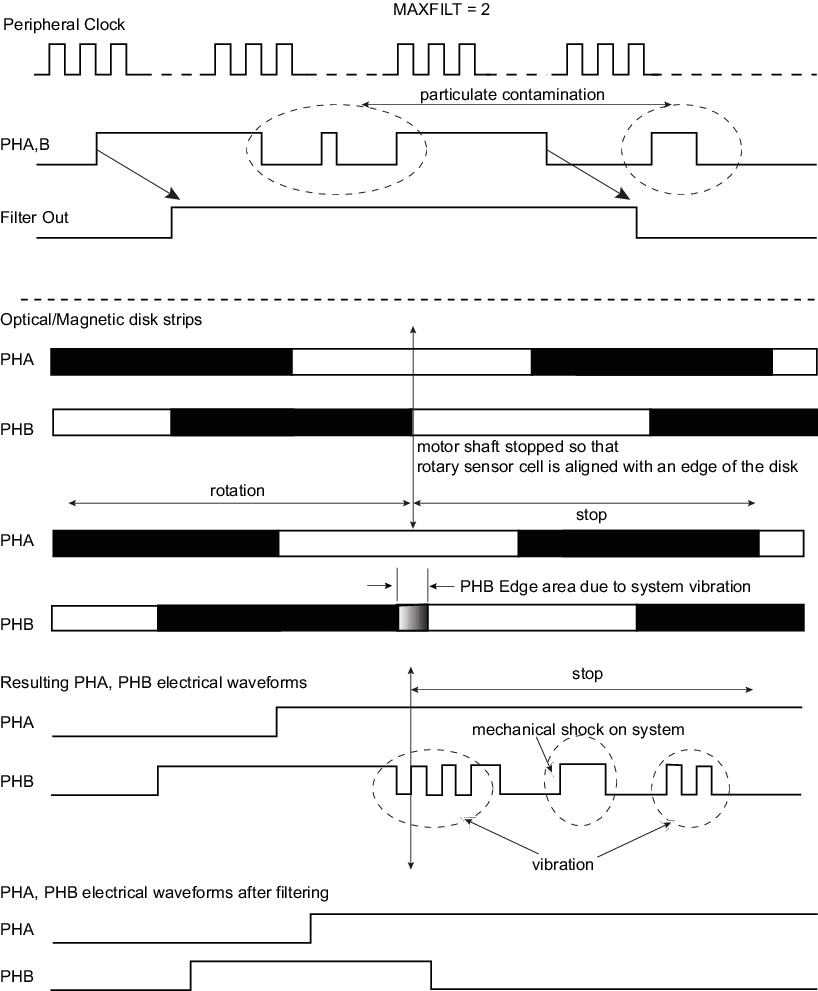
TC_BMR. MAXFILT is used to configure a minimum duration for which the pulse is stated as valid. When the filter is active, pulses with a duration lower than (MAXFILT +1) × tperipheral clock are not passed to downstream logic.
The value of (MAXFILT +1) × tperipheral clock must not be greater than 10% of the minimum pulse on PHA, PHB or index when the rotary encoder speed is at its maximum. This speed depends on the application.
Input filtering can efficiently remove spurious pulses that might be generated by the presence of particulate contamination on the optical or magnetic disk of the rotary sensor.
Spurious pulses can also occur in environments with high levels of electromagnetic interference. Or, simply if vibration occurs even when rotation is fully stopped and the shaft of the motor is in such a position that the beginning of one of the reflective or magnetic bars on the rotary sensor disk is aligned with the light or magnetic (Hall) receiver cell of the rotary sensor. Any vibration can make the PHA, PHB signals toggle for a short duration.