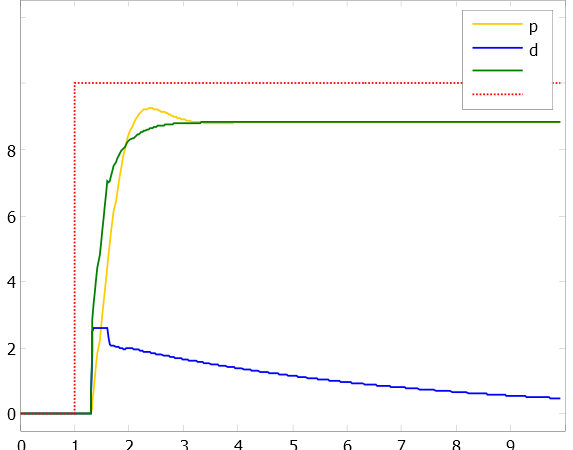
The derivative term (D) gives an addition from the rate of change in the error to the system control input. A rapid change in the error will give an addition to the system control input. This improves the response to a sudden change in the system state or reference value. The D term is typically used with the P or PI as a PD or PID controller. A too large D term usually gives an unstable system. The figure below shows D and PD controller responses. The response of the PD controller gives a faster rising system process value than the P controller. Note that the D term essentially behaves as a high-pass filter on the error signal and thus easily introduces instability in a system and make it more sensitive to noise.