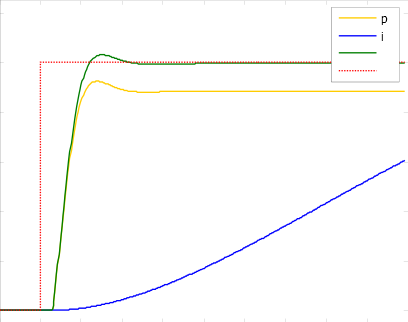
The integral term (I) gives an addition from the sum of the previous errors to the system control input. The summing of the error will continue until the system process value equals the desired value, and this results in no stationary error when the reference is stable. The most common use of the I term is normally together with the P term, called a PI controller. Using only the I term gives slow response and often an oscillating system. The figure below shows the step responses to a I and PI controller. As seen the PI controller response have no stationary error and the I controller response is very slow.
Figure 1. Step Response I and
PI Controller