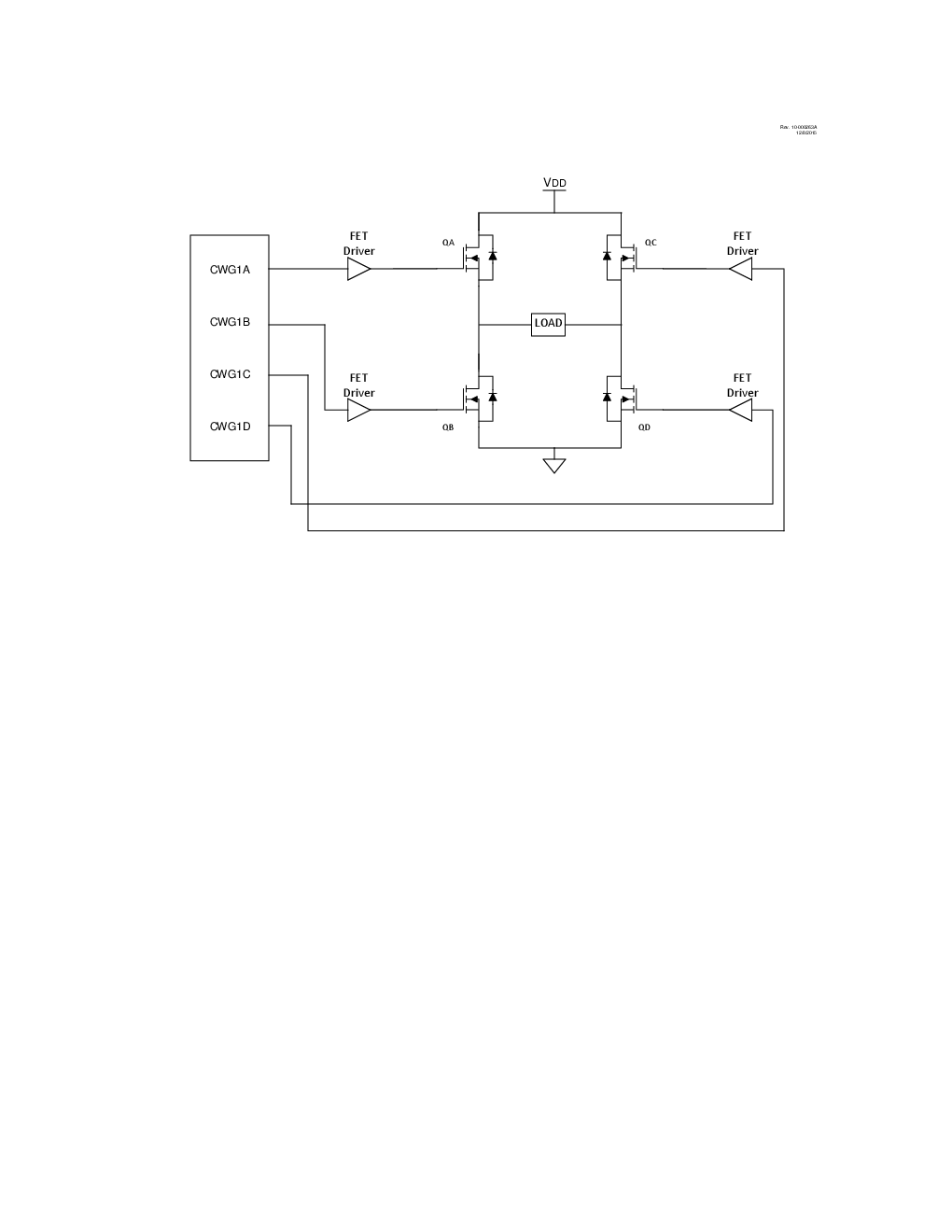
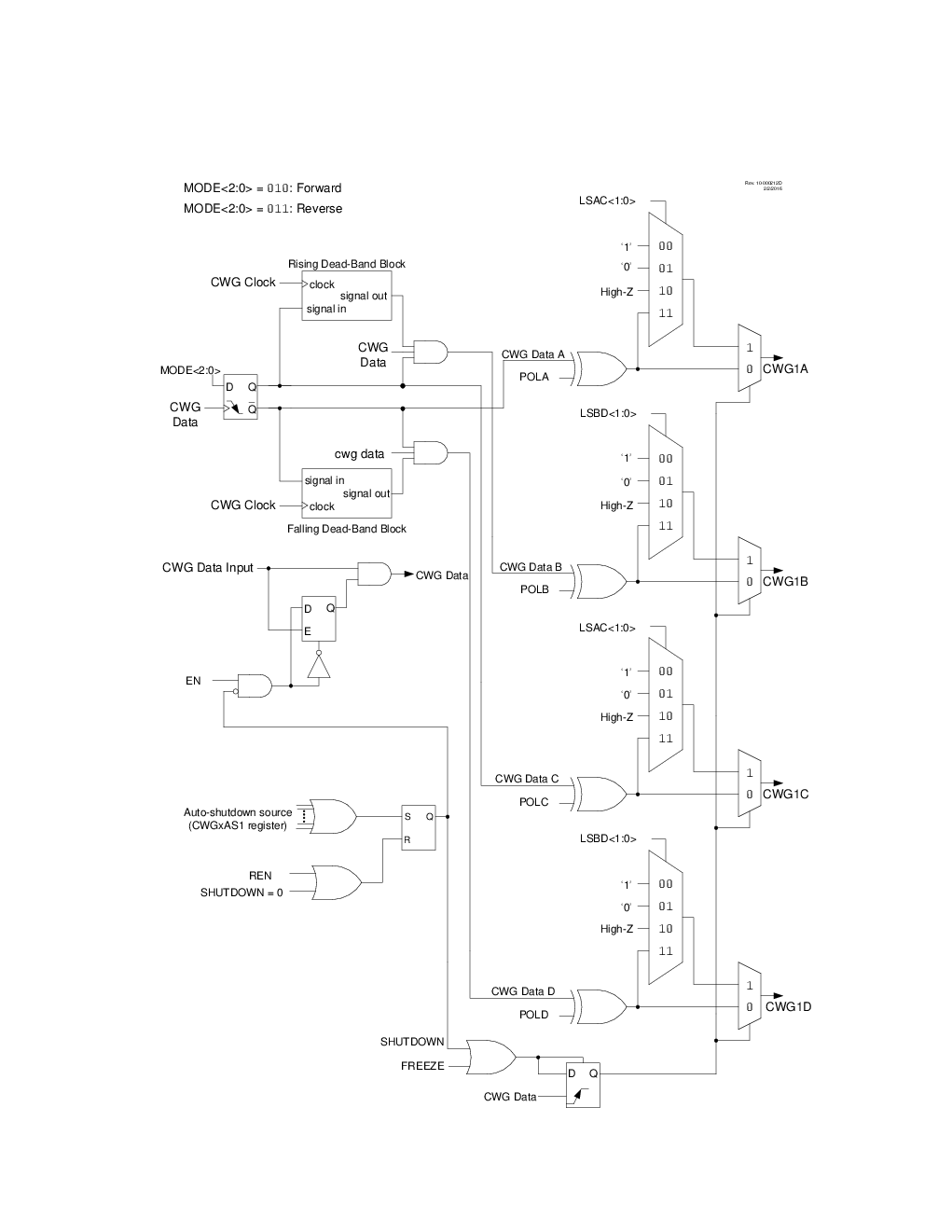
In Forward and Reverse Full-Bridge modes, three outputs drive static values while the fourth is modulated by the input data signal. The mode selection may be toggled between forward and reverse by toggling the MODE<0> bit of the CWGxCON0 while keeping MODE<2:1> static, without disabling the CWG module. When connected, as shown in Figure 1, the outputs are appropriate for a full-bridge motor driver. Each CWG output signal has independent polarity control, so the circuit can be adapted to high-active and low-active drivers. A simplified block diagram for the Full-Bridge modes is shown in Figure 2.
In Forward Full-Bridge mode (MODE = 010), CWGxA is driven to its
active state, CWGxB and CWGxC are driven to their inactive state, and CWGxD is modulated by
the input signal, as shown in Figure 3.
In Reverse Full-Bridge mode (MODE = 011), CWGxC is driven to its
active state, CWGxA and CWGxD are driven to their inactive states, and CWG1B is modulated
by the input signal, as shown in Figure 3.
In Full-Bridge mode, the dead-band period is used when there is a switch from forward to reverse or vice-versa. This dead-band control is described in Dead-Band Control, with additional details in Rising Edge and Reverse Dead Band and Falling Edge and Forward Dead Band. Steering modes are not used with either of the Full-Bridge modes. The mode selection may be toggled between forward and reverse toggling the MODE<0> bit of the CWGxCON0 while keeping MODE<2:1> static, without disabling the CWG module.
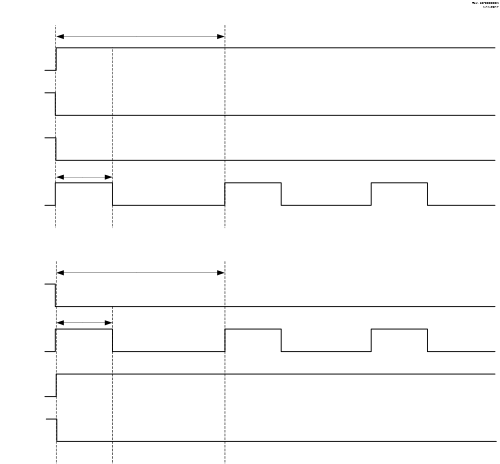
- 1.A rising CWG data input creates a rising event on the modulated output.
- 2.Output signals shown as active-high; all POLy bits are clear.