3.2 Feed Forward Current Regulation
In this implementation, the application automatically adjusts the drive amplitude according to the power supply voltage, trying to keep the current constant through the coils.
The duty cycle (amplitude) is adjusted so that the current through the two coils is ideally independent of the power supply voltage and cvasi-constant.
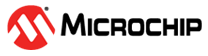
The BEMF is directly proportional to the speed of the rotor.
This method has limitations. There may be cases when the power supply voltage may be too small to produce the desired current through the coils. For example, the power supply voltage is 6V, the windings resistance is 10Ω, and the desired current through the coils is 1A; the current consumption in this case would be less than 1A.
The application adjusts the amplitude according to the speed of the stepper (BEMF).
VBEMF (Back Electromotive Force) = Kv * Speed
As (Static Amplitude)= I * R/VBUS
Ad (Dynamic Amplitude)=Kv * Speed/VBUS
Drive Amplituude = (As +Ad) * VBUS