3.2 Six-Step (Trapezoidal) Commutation
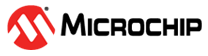
The trapezoidal control consists of three phases (A, B, and C in this case), from which two phases are driven, and the third is left floating, thus, giving the ability to detect the zero-cross of the BEMF generated by the moving rotor.
Each step or sector represents 60 degrees from a total of 360 degrees or one full electrical revolution.

| Step 1: | Step 4 |
|
|
| Step 2: | Step 5: |
|
|
| Step 3: | Step 6: |
|
|
At constant speed, or for small speed variations, the period between two commutations is equal. This is the estimation for controlling the motor in Closed Loop.
This implementation uses trapezoidal commutation due to its simplicity and ability to be very easily implemented in 8-bit microcontrollers, as it needs little memory resources and processing power.