3.4.2 Bipolar Switching
Unlike unipolar switching, bipolar switching requires four transistors to be energized during one trapezoidal step.
In contrast to the unipolar switching, in this case, the other two transistors to be energized are complementary to those characteristic to each step.
This behavior is expressed in the following situation:
The characteristic state is AH-BL, which means that phase A is tied HIGH and phase B is tied LOW. This is done by energizing the high-side transistor of the phase A half-bridge, and the low-side transistor of phase B.

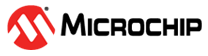
The complementary state of AH-BL will be AL-BH and the current will flow in this way. See Figure 3-5 below.

Considering zero speed at 0% duty cycle for unipolar drive, in this case, the zero speed is at 50% duty cycle, where the complementary state time is equal to the characteristic state.
This method has the advantage of a very clean BEMF because all the voltage induced in the floating phase is canceled by the complementary state, thus, obtaining a waveform that will contain only high-frequency spikes, which can be filtered using an RC filter with a very small time constant.
The main disadvantage of this method is that the motor emits more electromagnetic and acoustic noise and increases the overall system loss due to another transistor pair needed to switch.
The voltage on one phase can be seen in Figure 3-6.

The high-frequency spikes appear at the transition between the characteristic state and the complementary state. These can be observed in low-inductance motors where the amplitude of the spikes gets higher near the commutation zones.

In Figure 3-7, the first three waveforms represent the PWM signals for the three phases of the motor while the fourth waveform represents the sensed current through the transistors.
To avoid shoot-through, dead time will be added between the command signals of the drivers.


In Figure 3-9, the first three waveforms represent the PWM signal for the three phases while the fourth waveform is the sensed current through the transistors. The small spikes in the current waveform correspond to the transistors switching and represent a small amount of shoot-through. If no dead time was added, then the current would rise considerably and the transistors will warm up and burn up.
Switching Noise
Similar to unipolar switching, bipolar switching suffers from a specific problem: During commutation, when the motor has a certain amount of load applied to it, there will be a demagnetization sequence that will influence the detection of the zero-cross and potentially give a false input, which, in turn, will get the motor out of sync.
This can be particularly challenging as the demagnetization sequence can almost get to 30 electrical degrees, which will, in turn, limit the area in which the zero cross point can be detected, and potentially suppress it.
The solution to this behavior is to add a blanking time, during which the zero cross is ignored completely. This parameter will be dynamically set in the control algorithm and self-adapt during the entire range of RPM.
Regenerative Braking
A brushless motor can run in four different regions. These regions are called ‘quadrants’ and are described in Figure 3-10.

For this application note, only quadrant numbers one and two are of interest and the motor can run in either one, without the specific intervention of the control algorithm.
In quadrant one, the motor draws current from the bus and is free-running or has a load applied to it. The measured speed of the rotor is equal to or less than the set speed.
On the other side, in quadrant number two, the set speed of the motor is lower than the measured speed due to system inertia or other external forces.
The two-quadrant operation is directly related to the duty cycle, which will impose a specific RPM, given in the equation below.
, where Kv is a parameter of the motor and U is the voltage applied to the coils.The following concepts: RPMSET and RPMMEASURED provide information about the current RPM of the motor and the set RPM at any given time.
It is, thus, necessary to express the difference in the RPM with the formula:
If ΔRPM is greater than zero, then the motor is in quadrant one and draws current from the power supply.
Otherwise, if ΔRPM is less than zero, the motor is in quadrant two and pushes current to the power supply.
This is a rough approximation of how the motor behaves and does not account for variables such as friction losses or load.
In quadrant two, the system behaves like a boost converter and the maximum current that can be generated depends on the parameters of the motor, as well as the ΔRPM mentioned earlier and the ESR of the battery.
An equivalent circuit can be obtained for the motor:

The coil resistance and inductance are static throughout the RPM range but the BEMF is directly proportional to the RPM: . The BEMF amplitude is equal to the supply voltage multiplied by the PWM duty factor (for bipolar operation, 50% duty means 0V). If the motor does not have any load, the BEMF amplitude will approach the supply voltage at the full duty cycle.
To protect the system and the power supply from an Overvoltage condition, additional circuitry is needed to monitor the voltage on the bus.
