3 Microchip MPLAB® Harmony 3 Release Notes
MPLAB® Harmony 3 Motor Control Application Examples for SAM D5x/E5x family v3.5.0
Applications
Applications migrated from motor_control repository to this application repository for SAM D5x/E5x family.
| Development Boards | Number of Applications |
|---|---|
| dsPICDEM™ MCLV-2 Low Voltage Development Board | 5 |
| dsPICDEM™ MCHV-3 High Voltage Development Board | 3 |
| MCS MCLV-48V-300W Development Board | 2 |
Bug Fix
- Fixed the SMO library for bidirectional control
New Application and Features
- Added ZS/MT Hybrid position estimation based FOC project on MCLV-48V-300W board.
- Updated the example code with latest libraries.
Know Issues
- same as v3.1.0
Required MPLAB® Harmony v3 Modules
- bsp v3.21.0
- csp v3.19.7
- harmony-services v1.5.0
- motor_control v3.11.0
- x2c v1.5.0
Development Tools
- MPLAB X IDE v6.20
- MPLAB XC32 C/C++ Compiler v4.45
- MPLAB X IDE plug-ins:
- MPLAB Code Configurator (MCC) v5.7.1
- X2CScope v1.6.6.
MPLAB® Harmony 3 Motor Control Application Examples for SAM D5x/E5x family v3.4.1
Applications
Applications migrated from motor_control repository to this application repository for SAM D5x/E5x family.
| Development Boards | Number of Applications |
|---|---|
| dsPICDEM™ MCLV-2 Low Voltage Development Board | 7 |
| dsPICDEM™ MCHV-3 High Voltage Development Board | 5 |
Bug Fixes
- Updated the package.yml file
Know Issues
- same as v3.1.0
Required MPLAB® Harmony v3 Modules
- motor_control v3.10.0
- x2c v1.4.0
Development Tools
- MPLAB X IDE v6.10
- MPLAB XC32 C/C++ Compiler v4.30
- MPLAB X IDE plug-ins:
- MPLAB Code Configurator (MCC) v5.3.7
- X2CScope v1.3.3.
MPLAB® Harmony 3 Motor Control Application Examples for SAM D5x/E5x family v3.4.0
Applications
Applications migrated from motor_control repository to this application repository for SAM D5x/E5x family.
| Development Boards | Number of Applications |
|---|---|
| dsPICDEM™ MCLV-2 Low Voltage Development Board | 7 |
| dsPICDEM™ MCHV-3 High Voltage Development Board | 5 |
New Features
- Added ZS/MT hex files for ZS/MT based sensorless FOC demonstration
- MISRA-C Compliance for motor control files
- Deprecated static PLL based sensorless FOC project
- Deprecated static encoder based sensored FOC project
Know Issues
- same as v3.1.0
Required MPLAB® Harmony v3 Modules
- motor_control v3.10.0
- x2c v1.4.0
Development Tools
- MPLAB X IDE v6.10
- MPLAB XC32 C/C++ Compiler v4.30
- MPLAB X IDE plug-ins:
- MPLAB Code Configurator (MCC) v5.3.7
- X2CScope v1.3.3.
MPLAB® Harmony 3 Motor Control Application Examples for SAM D5x/E5x family v3.3.0
Applications
Applications migrated from motor_control repository to this application repository for SAM D5x/E5x family.
| Development Boards | Number of Applications |
|---|---|
| dsPICDEM™ MCLV-2 Low Voltage Development Board | 7 |
| dsPICDEM™ MCHV-3 High Voltage Development Board | 4 |
New Features
- Added PLL based sensorless FOC on MCHV3 in Harmony QSpin
- Added Encoder based sensored FOC on MCHV3 in Harmony QSpin
- Added PLL based PMSM FOC with Hall Sensor Startup example
Know Issues
- same as v3.1.0
Required MPLAB® Harmony v3 Modules
- bsp v3.14.0
- motor_control v3.9.0
- x2c v1.3.0
- mcc H3 Library v1.1.5
Development Tools
- MPLAB X IDE v6.00
- MPLAB XC32 C/C++ Compiler v4.10
- MPLAB X IDE plug-ins:
- MPLAB Code Configurator (MCC) v5.1.17
- X2CScope v1.3.3.
Hardware
- For MCHV3 board programming and debugging, use High Voltage Motor Control Isolated Debugger Card
MPLAB® Harmony 3 Motor Control Application Examples for SAM D5x/E5x family v3.2.0
Applications
Applications migrated from motor_control repository to this application repository for SAM D5x/E5x family.
| Development Boards | Number of Applications |
|---|---|
| dsPICDEM™ MCLV-2 Low Voltage Development Board | 6 |
| dsPICDEM™ MCHV-3 High Voltage Development Board | 3 |
New Features
- Added Motor Control Plant generated code for motor control firmware for PLL based sensorless FOC on MCLV2
- Added Motor Control Plant generated code for motor control firmware for Encoder based sensored FOC on MCLV2
- Migrated MHC generated motor control firmware to MCC generated motor control firmware
Know Issues
- Same as v3.1.0
Required MPLAB® Harmony v3 Modules
- csp v3.11.0
- bsp v3.11.1
- x2c v1.2.0
- motor_control v3.8.0
- dev_packs v3.11.0
- mcc v1.1.0
Development Tools
- MPLAB X IDE v6.00
- MPLAB XC32 C/C++ Compiler v4.00
- MPLAB X IDE plug-ins:
- MPLAB Code Configurator (MCC) v5.1.2
- X2CScope v1.3.0
MPLAB® Harmony 3 Motor Control Application Examples for SAM D5x/E5x family v3.1.0
Applications
Applications migrated from motor_control repository to this application repository for SAM D5x/E5x family.
| Development Boards | Number of Applications |
|---|---|
| dsPICDEM™ MCLV-2 Low Voltage Development Board | 4 |
| dsPICDEM™ MCHV-3 High Voltage Development Board | 3 |
New Features
- Added static example project - pmsm_foc_hall_sam_e54 on MCLV2 board
Know Issues
- ATSAME54 Motor Control Plugin Module based demos may see noise coupling on
the ADC channels resulting in motor instability/stall.
- This issue can be resolved by ensuring that R1 (0 ohm) resistor is populated.
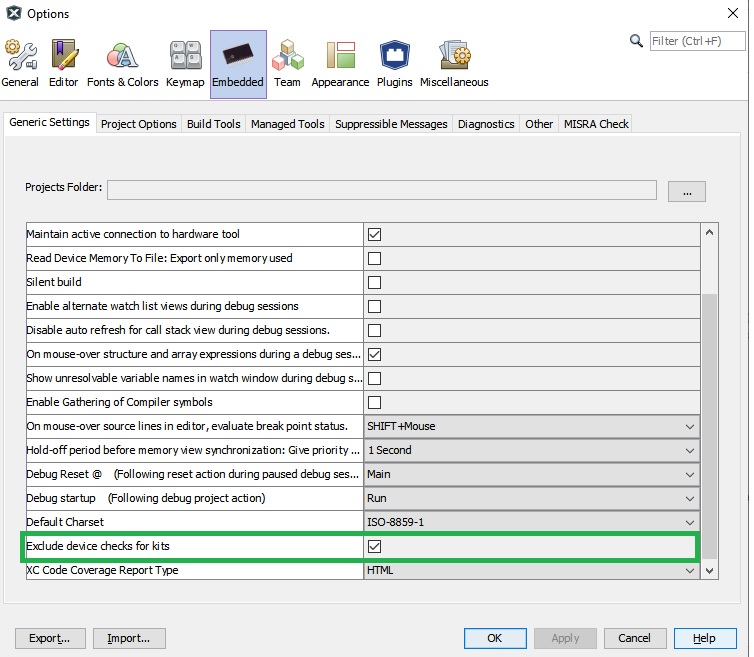
- Isolated EDBG Card
- The Isolated EDBG Card may appear “grayed out” (disabled) under the
list of tools in MPLABX v5.45. In order to resolve this issue,
please go to Tools -> Options ->Embedded->Generic Settings and
enable “Exclude device checks for kits” by selecting the check
box.
- If programming failure occurs with message “java.lang.RuntimeException:RDDI_DAP_OPERATION_FAILED”, then reset the Isolated EDBG Card’s configuration by Go to File -> Project Properties -> EDBG -> Reset
- The Isolated EDBG Card may appear “grayed out” (disabled) under the
list of tools in MPLABX v5.45. In order to resolve this issue,
please go to Tools -> Options ->Embedded->Generic Settings and
enable “Exclude device checks for kits” by selecting the check
box.
- pmsm_foc_encoder_sam_e54_mchv3 application running on dsPICDEM MCHV-3
requires increasing bandwidth of the quadrature encoder signal filter to
maintain signal integrity of quadrature sensor signals at higher motor
speeds. Without these modifications, motor operation may fail at higher
speeds.
- Reduce the capacitance value of C25, C26 and C27 from 100pF to 10pF 50V NPO 0805
Required MPLAB® Harmony v3 Modules
- csp v3.9.1
- x2c v1.1.4
- motor_control v3.7.0
- dev_packs v3.9.0
- mhc v3.8.0
Development Tools
- MPLAB X IDE v5.50
- MPLAB XC32 C/C++ Compiler v3.01
- MPLAB X IDE plug-ins:
- MPLAB Harmony Configurator (MHC) v3.6.4
- X2CScope v1.3.0.
MPLAB® Harmony 3 Motor Control Application Examples for SAM D5x/E5x family v3.0.0
Applications
Applications migrated from motor_control repository to this application repository for SAM D5x/E5x family.
| Development Boards | Number of Applications |
|---|---|
| dsPICDEM™ MCLV-2 Low Voltage Development Board | 3 |
| dsPICDEM™ MCHV-3 High Voltage Development Board | 3 |
Know Issues
- ATSAME54 Motor Control Plugin Module based demos may see noise coupling on
the ADC channels resulting in motor instability/stall.
- This issue can be resolved by ensuring that R1 (0 ohm) resistor is populated.
- Isolated EDBG Card
- The Isolated EDBG Card may appear “grayed out” (disabled) under the
list of tools in MPLABX v5.45. In order to resolve this issue,
please go to Tools -> Options ->Embedded->Generic Settings and
enable “Exclude device checks for kits” by selecting the check
box.
- If programming failure occurs with message “java.lang.RuntimeException:RDDI_DAP_OPERATION_FAILED”, then reset the Isolated EDBG Card’s configuration by Go to File -> Project Properties -> EDBG -> Reset
- The Isolated EDBG Card may appear “grayed out” (disabled) under the
list of tools in MPLABX v5.45. In order to resolve this issue,
please go to Tools -> Options ->Embedded->Generic Settings and
enable “Exclude device checks for kits” by selecting the check
box.
- pmsm_foc_encoder_sam_e54_mchv3 application running on dsPICDEM MCHV-3
requires increasing bandwidth of the quadrature encoder signal filter to
maintain signal integrity of quadrature sensor signals at higher motor
speeds. Without these modifications, motor operation may fail at higher
speeds.
- Reduce the capacitance value of C25, C26 and C27 from 100pF to 10pF 50V NPO 0805
Required MPLAB® Harmony v3 Modules
- csp v3.8.3
- x2c v1.1.3
- motor_control v3.6.0
- dev_packs v3.8.0
- mhc v3.6.5
Development Tools
- MPLAB X IDE v5.45
- MPLAB XC32 C/C++ Compiler v2.50
- MPLAB X IDE plug-ins:
- MPLAB Harmony Configurator (MHC) v3.6.2
- X2CScope v1.3.0.