4.1.1 Hardware Timing and Synchronization
Field-oriented control requires accurate and precise timings to perform hardware and software functions for optimal motor control performance. The motor control dedicated peripherals of the SAME70 MCU enables handling of these timing requirements at the hardware level with minimal user settings.
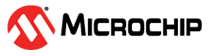
The following figure illustrates the implementation of hardware timing and synchronization.

The PWM peripheral of the microcontroller in addition to generating the three phase PWM signals, triggers the ADC channels periodically on period match event. The triggered ADC channels take phase current A and phase current B as inputs and convert the signals to their digital equivalent for use by the software. Simultaneous samples of the phase currents are taken for optimal performance. In addition to phase currents, the software also measures the DC bus voltage. After the ADC conversion of the phase currents is completed, an interrupt is generated. The generated interrupt is used to carry-out start-up and subsequent FOC tasks. The calculated PWM cycles are updated in the PWM module to actuate the motor.