2.6 Foundation Drivers: SPI Master - Loopback
Video demonstrating how to use the SPI Master Loopback example code snippet.
Video: Foundation Drivers - SPI Master Loopback
spi_master_example.c
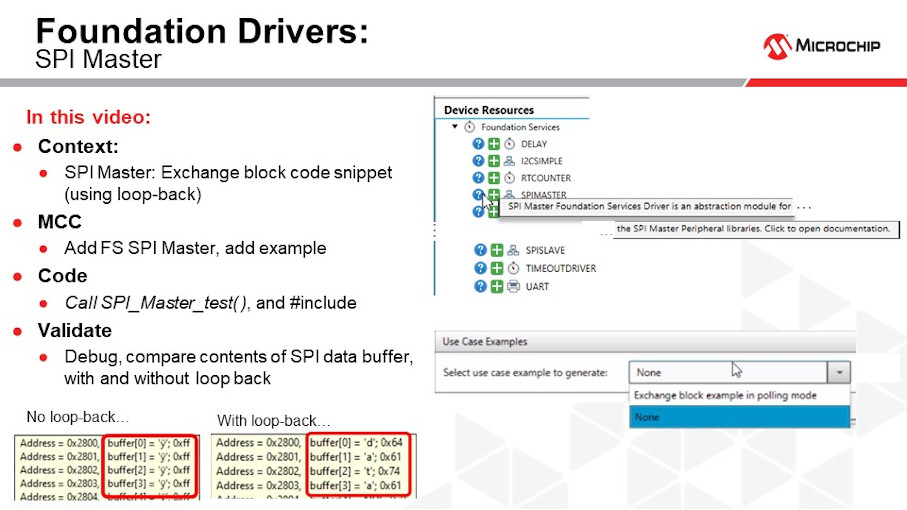
/** \file \brief This file contains sample source codes to demonstrate the SPI Foundation Services APIs. For this example application to work the following needs to be done: 1. Configure the SPI module as follows: - Enable SPI: ticked - Modes: Master - Interrupt driven: unticked - Configure other settings as desired. - Select TX and RX pins in Pin Manager: Grid View. 2. Make loop back connection to MISO and MOSI or connect SPI pins to a slave 3. If connected to a slave, assign CS pin and add the necessary calls in drive_slave_select_low() and drive_slave_select_high() 4. Program the slave device to exchange the string "data" 5. Call SPI_Master_test() from main() This example works like this: 1. Upon reset, the application will transmit a string "data" and read the same number of bytes back. 2. The program will then compare the received string with "data". Returns 1 to indicate a match or 0 if not. \copyright (c) 2020 Microchip Technology Inc. and its subsidiaries. \page License (c) 2020 Microchip Technology Inc. and its subsidiaries. You may use this software and any derivatives exclusively with Microchip products. THIS SOFTWARE IS SUPPLIED BY MICROCHIP "AS IS". NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, APPLY TO THIS SOFTWARE, INCLUDING ANY IMPLIED WARRANTIES OF NON-INFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE, OR ITS INTERACTION WITH MICROCHIP PRODUCTS, COMBINATION WITH ANY OTHER PRODUCTS, OR USE IN ANY APPLICATION. IN NO EVENT WILL MICROCHIP BE LIABLE FOR ANY INDIRECT, SPECIAL, PUNITIVE, INCIDENTAL OR CONSEQUENTIAL LOSS, DAMAGE, COST OR EXPENSE OF ANY KIND WHATSOEVER RELATED TO THE SOFTWARE, HOWEVER CAUSED, EVEN IF MICROCHIP HAS BEEN ADVISED OF THE POSSIBILITY OR THE DAMAGES ARE FORESEEABLE. TO THE FULLEST EXTENT ALLOWED BY LAW, MICROCHIP'S TOTAL LIABILITY ON ALL CLAIMS IN ANY WAY RELATED TO THIS SOFTWARE WILL NOT EXCEED THE AMOUNT OF FEES, IF ANY, THAT YOU HAVE PAID DIRECTLY TO MICROCHIP FOR THIS SOFTWARE. MICROCHIP PROVIDES THIS SOFTWARE CONDITIONALLY UPON YOUR ACCEPTANCE OF THESE TERMS. */ #include <stdio.h> #include <string.h> #include "../drivers/spi_master.h" static uint8_t buffer[16] = "data"; static void drive_slave_select_low(void); static void drive_slave_select_high(void); static void drive_slave_select_low(){ // Control GPIO to drive SS_bar low } static void drive_slave_select_high(){ // Control GPIO to drive SS_bar high } uint8_t SPI_Master_test(void) { // Test driver, assume that the SPI MISO and MOSI pins have been looped back if(!spi_master_open(MASTER0)) // Not able to open SPI, call fail() or optionally do something // else waiting for the SPI to become free return 0; drive_slave_select_low(); SPI0_ExchangeBlock(buffer, sizeof(buffer)); drive_slave_select_high(); SPI0_Close(); // Check that the correct data was received if (strncmp((char*)buffer, "data", strlen("data"))) return 0; // ERROR: Wrong data received // If we get here, everything was OK return 1; } /** End of File */