1.3 Firmware Implementation
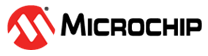
One of the most common ways to implement a state machine is through a firmware or software-based approach. In a firmware-based implementation, the state of the machine is typically implemented as software variables, and the state transitions and outputs are determined by writing code to implement the logic. The state time is usually determined by a software-based counter, which is usually derived from an underlying hardware timer. Figure 1-7 shows code snippet of a typical state machine implemented in firmware.
While the firmware-based solution is easy to implement, it takes up valuable CPU resources to process the state machine. In addition, the firmware-based solution is not power friendly since the CPU cannot be put to sleep.
void stateMachine() { while(1) { if(state_time == 0) { // Reload timer for state time state_time = RELOAD_VAL; // Current States and Outputs switch(current_state) { case STATE_INIT: // Current state stateInitializeTasks(); // Output function next_state = STATE_EXECUTE; // Direct state transition break; case STATE_EXECUTE: // Current state stateExecuteTasks(); // Output function if(execution_complete) // Conditional state transition next_state = STATE_END; else next_state = current_state; break; case STATE_END: // Current state stateEndTasks(); // Output function next_state = STATE_INIT; // Direct state transition break; default: nextState = currentState; break; } // State Transitions (Next-state Functions) currentState = nextState; // Change software counter for state time state_time--; } } }