26.3.2.8 Synchronization
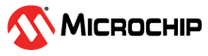
A clock synchronization algorithm is necessary for solving situations where more than one master is trying to control the SCL line at the same time. The algorithm is based on the same principles used for the clock stretching previously described. Figure 26-11 shows an example where two masters are competing for control over the bus clock. The SCL line is the wired-AND result of the two masters clock outputs.

A high-to-low transition on the SCL line will force the line low for all masters on the bus, and they will start timing their low clock period. The timing length of the low clock period can vary among the masters. When a master (DEVICE1 in this case) has completed its low period, it releases the SCL line. However, the SCL line will not go high until all masters have released it. Consequently, the SCL line will be held low by the device with the longest low period (DEVICE2). Devices with shorter low periods must insert a wait state until the clock is released. All masters start their high period when the SCL line is released by all devices and has gone high. The device, which first completes its high period (DEVICE1), forces the clock line low, and the procedure is then repeated. The result is that the device with the shortest clock period determines the high period, while the low period of the clock is determined by the device with the longest clock period.