2.1.5 Proportional Integral Controller
A Proportional Integral (PI) controller is the most widely used algorithm for motor control applications. Although it may not be the most optimum controller for all applications, it is easy to understand and tune. The following equation describes a traditional PI controller:
- r(t) and y(t) are reference and actual process/plant signals
- Kp,Ki are the proportional and integral gain
Practical PI controllers face the problem of integrator windup. Integrator windup is a condition that occurs when a large ensuing error is present in the plant or process. The integrator continually builds up during this following error condition even though the output is saturated. The integrator then unwinds when the plant reaches its final value causing excessive oscillation. To avoid accumulation of integrators when the output saturates, anti-windup techniques are used.
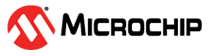
The following figure shows a PI controller with back calculation based anti-windup: