2.1.3 Inverse Park Transformation
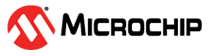
The Inverse Park Transformation transforms electrical signals from the rotating two-axis orthogonal reference frame (dq) to the two-axis orthogonal stationary reference frame (ɑβ) as shown in the following figure.
The transform is expressed by the following equations:
Where:
Ud and Uq are voltages in the two-axis orthogonal dq rotating reference frame, and Uα and Uβ are voltages in the two-axis orthogonal αβ reference frame.