1.4 CAN Bootloader
The CAN bootloader Library can be used to upgrade firmware on a target device without the need for an external programmer or debugger.
Features
- Supported on CORTEX-M and MIPS based MCUs, and MPUs
- Uses Harmony 3 CAN PLIB to communicate resulting in smaller bootloader size
- Supports Fail Safe update
- Takes Binary File as input
- Receives Binary from an C Embedded Host Device
Running From SRAM (For SAM Devices)
- Has capability to self update as it
is running from SRAM
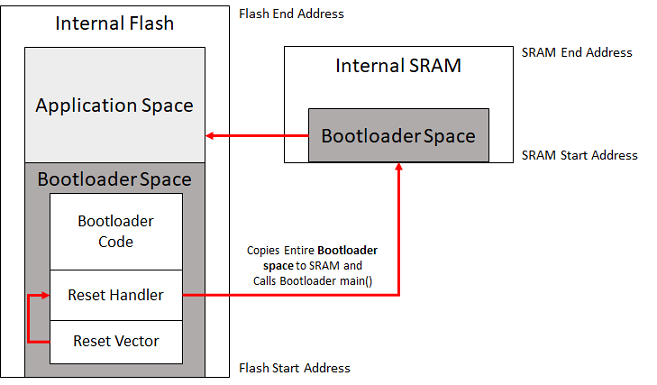
- At reset the bootloader Reset handler copies the entire bootloader firmware into SRAM from Start location and start executing from SRAM
- Once the application is called from bootloader, applications startup code takes control over SRAM and starts executing
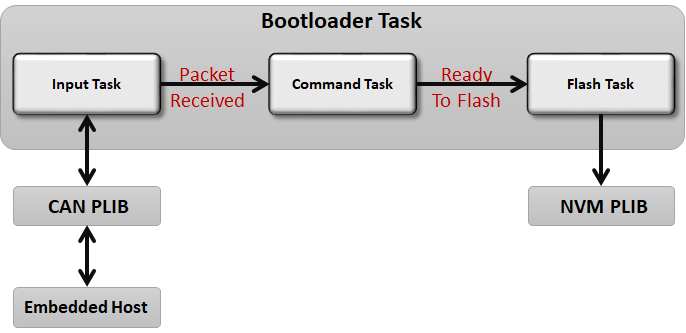
CAN Bootloader Block Diagram
-
Input Task:
-
This task is responsible for receiving data from Embedded Host through the CAN interface
-
The task keeps polling for data to be received when bootloader is in Idle mode
-
Once the packet reception is completed it gives control to Command Task
-
-
Command Task:
-
The task first validates the incoming packet from host with expected header information
-
The task processes the commands received from Input Task and provides response back to host accordingly
-
If the command received is a Data command it gives control to the Flash Task
-
-
Flash Task:
-
This task is responsible to program the internal Flash memory with data packet received
-
The task uses the NVM peripheral library to perform the Unlock/Erase/Write Operations
-
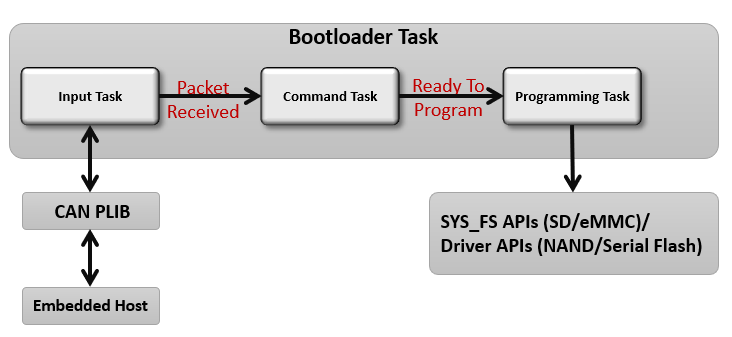
MPU CAN Bootloader
-
MPU CAN bootloader performs the following functions:
-
It loads the harmony application from SD/eMMC/NAND/Serial Flash memory to the DDR memory and executes it
-
It receives new harmony application image and writes it to SD/eMMC/NAND/Serial Flash memory
-
-
Input Task:
-
This task is responsible for receiving data from Embedded Host through the CAN communication interface
-
The task keeps polling for data to be received when bootloader is in Idle mode
-
The task also validates the incoming packet from host with expected header information
-
Once the packet reception is completed it gives control to Command Task
-
-
Command Task:
-
This task processes the commands received from Input Task and provides response back to host accordingly
-
If the command received is a Data command it gives control to the Programming Task
-
-
Programming Task:
-
This task is responsible to program the SD/eMMC/NAND/Serial Flash memory with data packet received
-
The task uses the following System service or Driver to perform the Unlock/Erase/Write/Read Operations
- MPU CAN bootloader with SD/eMMC media uses SYS_FS (FAT-FS) API to perform the Write/Read Operations
- MPU CAN bootloader with NAND Flash media uses NAND Flash Driver API to perform the Unlock/Erase/Write/Read Operations
- MPU CAN bootloader with Serial Flash media uses Flash Driver (e.g., SST26 Driver) API to perform the Unlock/Erase/Write/Read Operations
-