1.6 Proportional Integral Controller Background
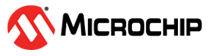
The Proportional Integral (PI) controller shown in the following figure uses the measurement of the controlled quantity (Y) to calculate an “error,” which corrects the quantity used for the control (X).
The quantity which operates on the plant (X) is computed as the sum of a term proportional to the error and a term proportional to the integral of the error.
The proportional term alone is inadequate in all the cases in which a non-zero control quantity is needed in steady state.
This “offset”, which allows the zeroing of the error in steady state, is given by the integral action.

When the output (X) of the PI controller reaches its saturation value, and if the error is not zero, the integral memory continues to grow up.
In these conditions, to avoid numerical problems or delayed action when the error changes its sign, a correction of the integral action is needed. This “anti-windup” can be a simple clamp of the integral memory, or it can consist in a more or less sophisticated integral action modification strategy.
A good compromise between the complexity and the achievable results can be the following strategy:
- When the output is saturated, and the error has the same sign of the output, then the integration is stopped, even if the integral memory is still under its saturation level
- Another good strategy is to limit the integral memory under a clamp value obtained by subtracting the proportional action to the maximum allowable output value