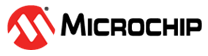
1.4.1 Power-up/down Sequence (ATWINC/ATWILC)
The power-up/down sequence for ATWINC/ATWILC is shown in the following figure. The timing parameters are provided in following the table.

| Parameter | Min. | Units | Description |
|---|---|---|---|
| tA | 0 | ms |
|
| tB | 0 | ms |
|
| tC | 5 | ms |
|
| tA’ | 0 | ms |
|
| tB’ | 0 | ms |
|
| tC’ | 0 | ms |
|
It is mandatory that the ATWINC/ATWILC chip is in the right bootloader state for establishing connection from GUI through I2C. To do that, the host MCU must power-up the ATWINC/ATWILC chip and then perform the reset sequence as defined in the figure Power-up/down Sequence (ATWINC/ATWILC). This is done very easily from the host MCU by calling the nm_bsp_init() and nm_bsp_reset() function. The code snippet for the same is as shown below,
int main(void)
{/* Initialize the board. */
system_init();
/* Initialize the BSP. */
nm_bsp_init();
nm_bsp_reset();
while(1) {
}
}