13.20.6.3.2 Hardware Handshaking
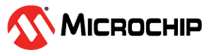
The USART features an out-of-band hardware handshaking flow control mechanism, implemented by connecting the RTS and CTS pins with the remote device, as shown in the figure below.

Hardware handshaking is only available in the following configuration:
- USART with internal clock (CTRLA.MODE=1),
- Asynchronous mode (CTRLA.CMODE=0),
- and Flow control pinout (CTRLA.TXPO=2).
When the receiver is disabled or the receive FIFO is full, the receiver will drive the RTS pin high. This notifies the remote device to stop transfer after the ongoing transmission. Enabling and disabling the receiver by writing to CTRLB.RXEN will set/clear the RTS pin after a synchronization delay. When the receive FIFO goes full, RTS will be set immediately and the frame being received will be stored in the shift register until the receive FIFO is no longer full.

The current CTS Status is in the STATUS register (STATUS.CTS). Character transmission will start only if STATUS.CTS=0. When CTS is set, the transmitter will complete the ongoing transmission and stop transmitting.
