24.3.2.4.6.2 Asynchronous Data Recovery
The data recovery unit uses sixteen samples in normal mode and eight samples in double speed mode for each bit. The following Figure shows the sampling process of data and parity bits.

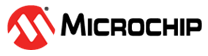
As for start bit detection, an identical majority voting technique is used on the three center samples for deciding of the logic level of the received bit. The process is repeated for each bit until a complete frame is received. It includes the first stop bit, but excludes additional ones. If the sampled stop bit is a '0' value, the Frame Error (FERR in USART.RXDATAH) flag will be set. The next Figure shows the sampling of the stop bit in relation to the earliest possible beginning of the next frame's start bit.

A new high-to-low transition indicating the start bit of a new frame can come right after the last of the bits used for majority voting. For normal speed mode, the first low level sample can be at the point marked (A) in Stop Bit Sampling and Next Start Bit Sampling. For double speed mode, the first low level must be delayed to point (B). Point (C) marks a stop bit of full length at nominal baud rate. The early start bit detection influences the operational range of the receiver.