35.5 DALI Mode (Full-Featured UARTs Only)
DALI is a protocol used for intelligent lighting control for building automation. The protocol consists of Control Devices and Control Gear. A Control Device is an application controller that sends out commands to the light fixtures. The light fixture itself is termed as a Control Gear. The communication is done using Manchester encoding, which is performed by the UART hardware.
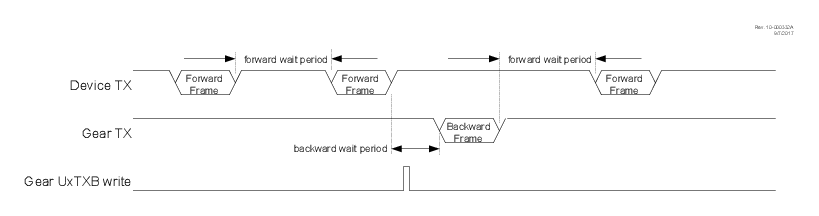
Manchester encoding consists of the clock and data in a single bit stream (refer to Figure 35-9). A high-to-low or a low-to-high transition always occurs in the middle of the bit period and may or may not occur at the bit period boundaries. When the consecutive bits in the bit stream are of the same value (i.e., consecutive ‘1’s or consecutive ‘0’s), a transition occurs at the bit boundary. However, when the bit value changes, there is no transition at the bit boundary. According to the standard, a half-bit time is typically 416.7 μs long. A double half-bit time or a single bit is typically 833.3 μs.
The protocol is inherently half-duplex. Communication over the bus occurs in the form of forward and backward frames. Wait times between the frames are defined in the standard to prevent collision between the frames.
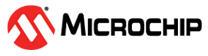
A Control Device transmission is termed as the forward frame. In the DALI 2.0 standard, a forward frame can be two or three bytes in length. The two-byte forward frame is used for communication between Control Device and Control Gear whereas the three-byte forward frame is used for communication between Control Devices on the bus. The first byte in the forward frame is the control byte and is followed by either one or two data bytes. The transaction begins when the Control Device starts a transmission. Unlike other protocols, each byte in the frame is transmitted MSb first. Typical frame timing is shown below.
During the communication between two Control Devices, three bytes are required to be transmitted. In this case, the software must write the third byte to UxTXB as soon as UxTXIF goes true and before the output shifter becomes empty. This ensures that the three bytes of the forward frame are transmitted back-to-back without any interruption.
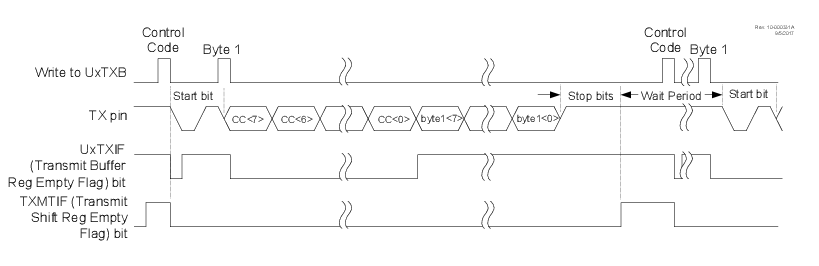
All Control Gear on the bus receive the forward frame. If the forward frame requires a reply to be sent, one of the Control Gear may respond with a single byte, called the backward frame. The 2.0 standard requires the Control Gear to begin transmission of the backward frame between 5.5 ms to 10.5 ms (~14 to 22 half-bit times) after reception of the forward frame. Once the backward frame is received by the Control Device, it is required to wait a minimum of 2.4 ms (~6 half-bit times). After this wait time, the Control Device is free to transmit another forward frame. Refer to the figure below.
The forward and backward frames are terminated by two Idle bit periods or Stop bits. Normally, these start in the first bit period of a byte. If both Stop bits are valid, the byte reception is terminated.
If either of the Stop bits is invalid, the frame is tagged as invalid by saving it as a null byte and setting the framing error in the receive FIFO.
A framing error also occurs when no transition is detected on the bus in the middle of a bit period when the byte reception is not complete. In such a scenario, the byte will be saved with the FERIF bit set.