66.5.1.6 Bus Monitoring Mode
The MCAN is set in Bus Monitoring mode by setting MCAN_CCCR.MON. In Bus Monitoring mode (see ISO11898-1, 10.12 Bus monitoring), the MCAN is able to receive valid data frames and valid remote frames, but cannot start a transmission. In this mode, it sends only recessive bits on the CAN bus. If the MCAN is required to send a dominant bit (ACK bit, overload flag, active error flag), the bit is rerouted internally so that the MCAN monitors this dominant bit, although the CAN bus may remain in recessive state. In Bus Monitoring mode, the Tx Buffer Request Pending register (MCAN_TXBRP) is held in reset state.
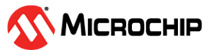
The Bus Monitoring mode can be used to analyze the traffic on a CAN bus without affecting it by the transmission of dominant bits. The figure below shows the connection of signals CANTX and CANRX to the MCAN in Bus Monitoring mode.
