2.2.2.1 Motor Parameters
Configuring PMSM (Permanent Magnet Synchronous Motor) parameters is crucial for achieving optimal Field-Oriented Control (FOC) performance. The QSpin uses these parameters to calculate default parameters for the FOC algorithm.
The Motor module enables the user to select from a wide number of motors from the Microchip catalog, as well as configure their own custom motor.
Graphical User Interface
Choose from a Wide Range of Motors
Follow the steps to select a motor from the Microchip catalog:
-
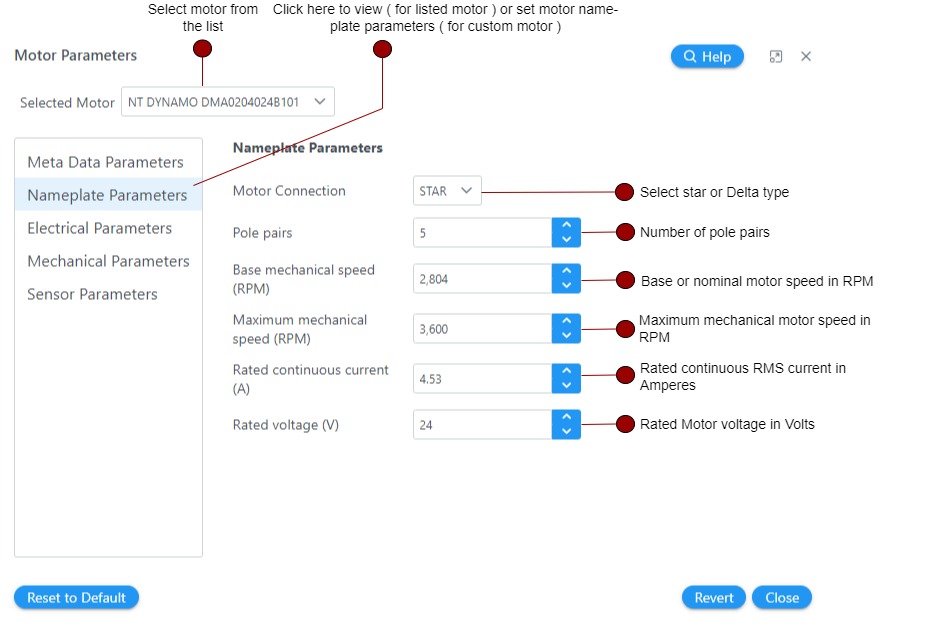
Select the motor from the drop-down menu as shown below:
The default motor parameters are displayed in their respective fields.
Add Your Custom Motor
Follow the steps to add your custom motor:
-
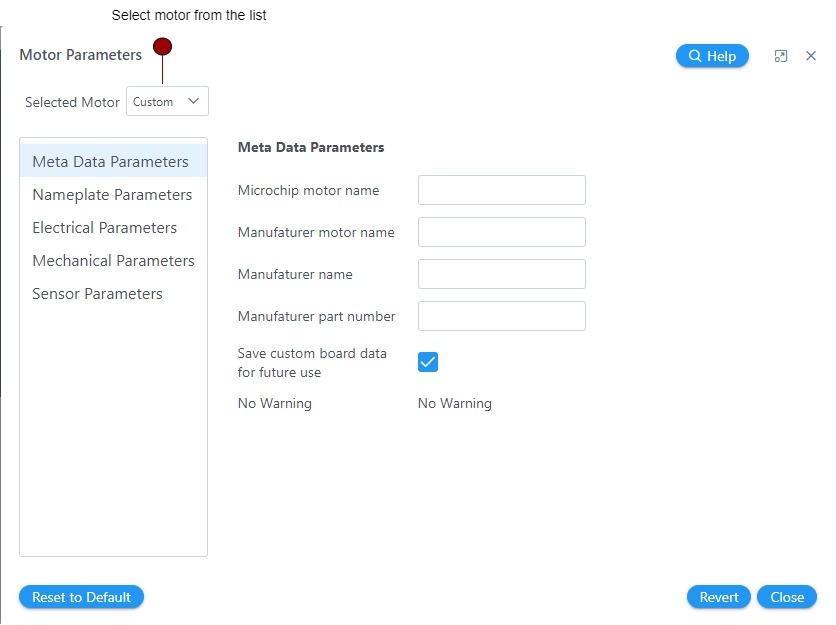
Select 'Custom' option from 'Select Motor' drop-down menu.
-
Update the name-plate parameters.
-
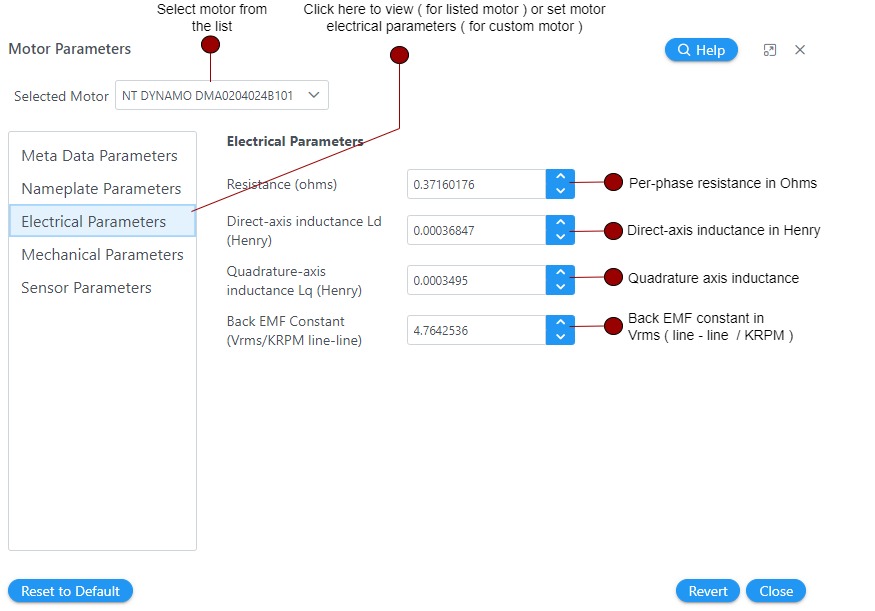
Update the electrical parameters.
-
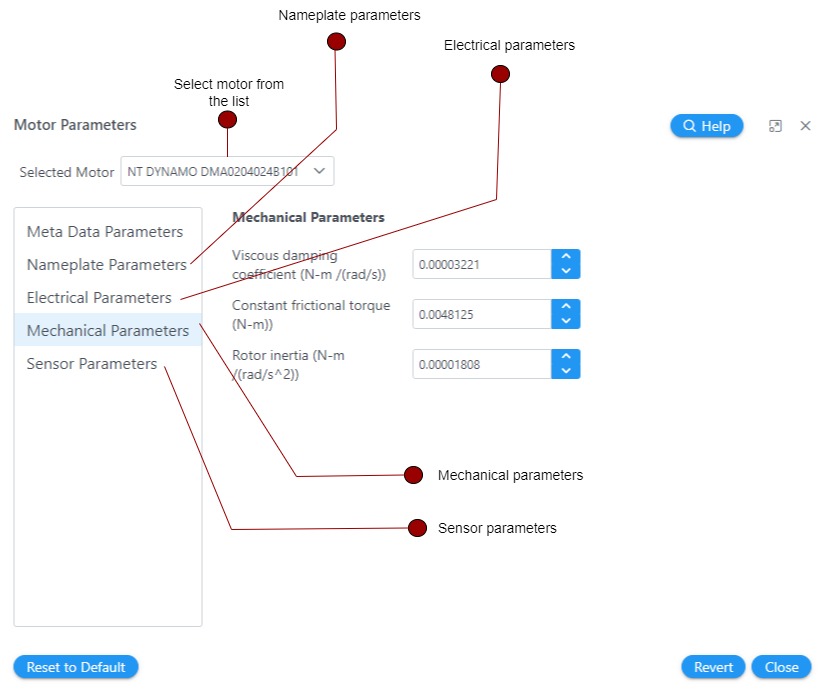
Update the mechanical parameters.
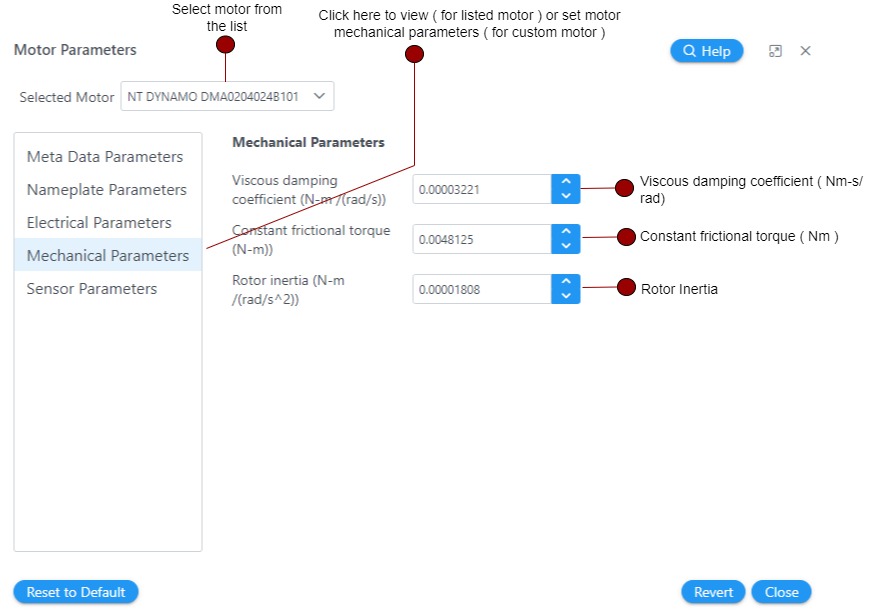
Currently, mechanical parameters do not impact the generated code. The configuration is intended for future use, so you do not need to configure these parameters at this time.
- Update sensor parameters.
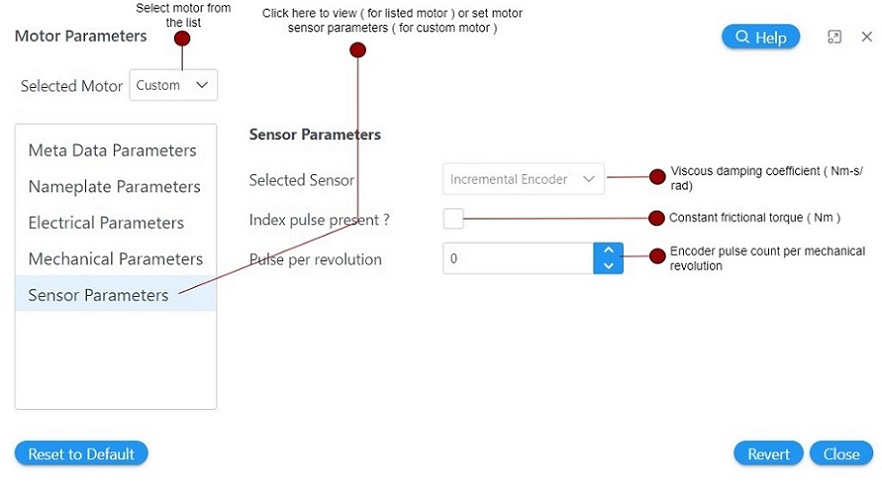
The QSpin only supports quadrature encoder interface. For other interfaces, contact Microchip Sales.
- Update the motor meta-data.
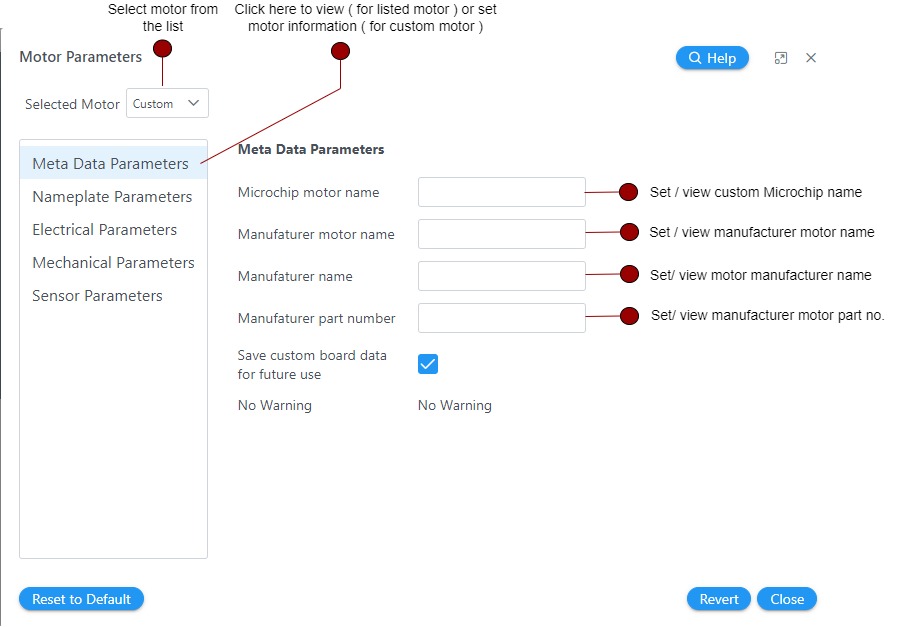
- Save the custom motor parameters.
- Check if your motor is listed in the 'Select motor' drop-down menu.
Using Custom Motors Across Harmony Projects
MCC Harmony allows you to use saved motor parameters across different projects by utilizing the MCC export and import feature. Follow these steps to export and import motor parameters:
-
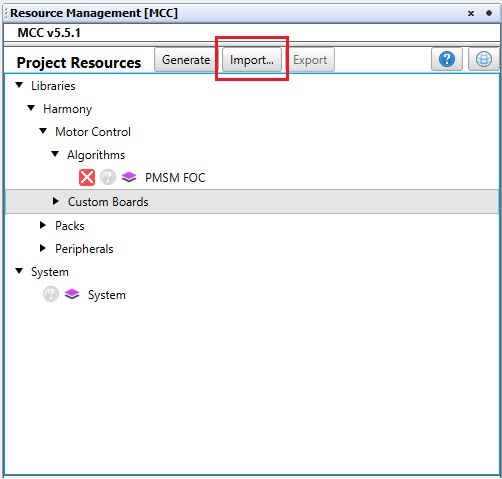
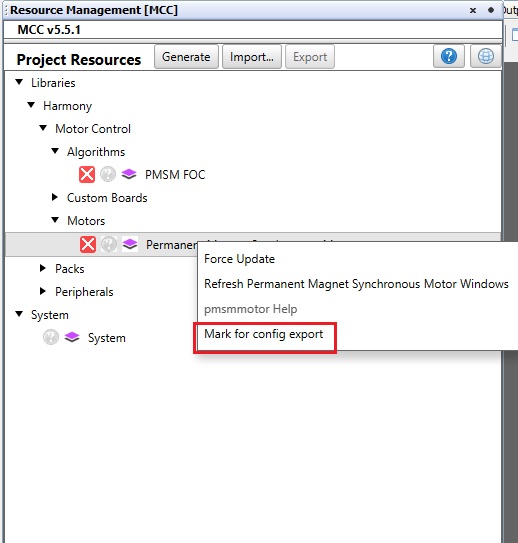
In the project resources, right-click on the Permanent Magnet Synchronous Motor to select 'Mark for export config' as shown below:
-
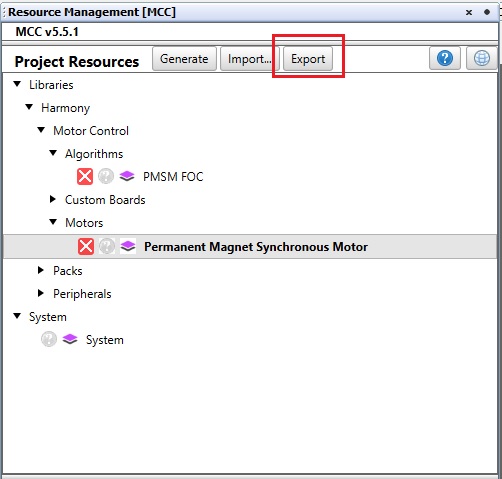
Export and save the .mc3 file to your local disk.
-
Import the saved .mc3 file into your new QSpin MCC Harmony project.