1.6 Getting Started with Timers
Enter a short description of your topic here (optional).
This is the start of your topic.
1.6 Introduction
| Authors: Alin Stoicescu, Marius Nicolae, Stefan Vlad, Microchip Technology Inc. |
This technical brief provides information about the Timers/Counters present on the PIC18 families of microcontrollers.
The document describes the application area, the modes of operation and the hardware and software requirements of the Timers/Counters and configurable output or input for internal or external use with the help of the Peripheral Pin Select (PPS).
Throughout the document, the configuration of the used peripherals for each use case will be described in detail. Additionally, this technical brief explains the concepts of the TMR0, TMR1/3/5 and TMR2/4/6 and their implementation in the PIC18 family of microcontrollers with the following use cases:
- TIMER 0
- Using
TMR0 in 8-bit Mode with Periodic Interrupt:
This example describes how to configure TMR0 in 8-bit mode and generate a compare interrupt every 100 ms, using LFINTOSC as clock source. A GPIO pin is toggled each time an interrupt occurs.
- Using
and operating TMR0 in 16-bit Mode while the Microcontroller is in
Sleep:
This example describes how to configure and operate TMR0 in 16-bit mode while the microcontroller is in Sleep mode and generate an overflow interrupt every ten seconds. When the interrupt occurs, a GPIO pin connected to an LED is ON for 100 ms and then the microcontroller is put back to Sleep.
- Using
TMR0 in 8-bit Mode and to Generate an Output
Signal:
This example describes how to configure TMR0 in 8-bit mode and generate a 125 Hz signal on one of the T0 output pins using Peripheral Pin Select (PPS).
- Using
TMR0 in 8-bit Mode with Periodic Interrupt:
- TIMER 1/3/5
- Using
TMR1 Gate to Measure Frequency:
This example shows how to use the TMR1 configured in Gate Single-Pulse and Toggle Combined mode. It will sample a full period of a signal. A GPIO pin will be configured as input and it will be connected to a periodical signal.
- Using
TMR1 to Trigger a Special Event:
This example shows how to use the TMR1 configured as a counter. The Capture/Compare/PWM (CCP) module will be configured with a user-defined value. A GPIO pin will be configured as an output for the CCP. When the counter reaches the CCP value, the pin logic value will be toggled.
- Using
TMR1 Gate to Measure Short vs Long Button Press:
This example shows how to use the TMR1 configured in Gate Single-Pulse mode. It will start counting when the button is pressed. Two different interrupts will be activated based on how long the button was pressed.
- Using
TMR1 Gate to Measure Frequency:
- TIMER 2/4/6
- Using
TMR2 as Auto-conversion Trigger for ADCC Module
This example will present how to use TMR2 peripheral to trigger the ADCC to make conversions at a fixed frequency rate that can be adjusted by modifying the period of TMR2.
- Using
TMR4 in One-Shot Mode with External Signal as
Reset
This example will present how to use TMR4 peripheral in One-Shot mode to stop TMR2 if an external pin is pulled to GND for more than the desired period.
- Using
TMR4 as HLT to Generate an Interrupt (like a WDT without
Reset)
This example will present how to use the TMR4 as a Hardware Limit Timer (HLT) in order to generate an interrupt and stop TMR2 that also stops the ADCC auto-conversion.
- Using
TMR2 as Alternate SPI Clock
This example will present how to use the TMR2 as alternate clock for SPI peripheral with a 10 kHz frequency.
- Using
TMR2 as Auto-conversion Trigger for ADCC Module
- For each use case, there are two different implementations that have the same functionality: one bare metal code example and one MPLAB® Code Configurator (MCC) generated code example.
- When using the 16-bit timer at lower system clock frequencies, there may be a significant delay between the timer overflow and the actual interrupt. Hence, for fast interrupt application (E.g.: interrupt period < 100 us), it is recommended to use the 16-bit timer at higher clock frequencies (FOSC >16 MHz).

1.6.1 Peripheral Overview
TIMER0
Timer0 can operate either as an 8-bit or 16-bit timer. The 16-bit mode is enabled by setting the T016BIT bit.
- TMR0L is reset
- The contents of TMR0H are copied to the TMR0H buffer for next comparison
In the 16-bit mode, TMR0H:TMR0L form the 16-bit timer value and read and write of the TMR0H register are buffered. Timer0 rolls over to 0x0000 on incrementing past 0xFFFF. This makes the timer free-running. TMR0L/H registers cannot be reloaded in this mode once started. In both 8-bit and 16-bit modes, Timer0 increments on the rising edge of the selected clock source.
TIMER 1/3/5
Timer1 is a 16-bit module which has the following features:
- 16-Bit Timer/Counter register
- Optionally synchronized comparator out
- Multiple Timer1 gate (count enable) sources
- Interrupt-on-Overflow
- Wake-Up on Overflow (external clock, Asynchronous mode only)
- Time base for the capture/compare function with the CCP modules
- Special Event Trigger (with CCP)
The following figure is a simplified diagram showing signal flow through the TMR1.

TIMER 2/4/6
- Free Running Period
- One-shot
- Monostable
Free-Running Period Mode
The value of T2TMR is compared to that of the Period register (T2PR) on each clock cycle. When the two values match, the comparator resets the value of T2TMR to 00h on the next cycle and increments the output postscaler counter. When the postscaler count equals the value in the OUTPS bits of the T2CON register, then a one clock period wide pulse occurs on the TMR2_postscaled output and the postscaler count is cleared.
One-Shot Mode
The One-Shot mode is identical to the Free-Running Period mode except for when the ON bit is cleared and the timer is stopped when T2TMR matches T2PR and will not restart until the ON bit is cycled off and on. The Postscaler (OUTPS) values other than zero are ignored in this mode because the timer is stopped at the first period event and the postscaler is reset when the timer is restarted.
Monostable Mode
Monostable modes are similar to One-Shot modes except for when the ON bit is not cleared and the timer can be restarted by an external Reset event.
- This signal comes from the pin selected by TxCKIPPS.
- TMRx register increments on rising edge.
- Synchronize does not operate while in Sleep.
- See TMRxCLK for clock source selections from device data sheet.
- See TMRxGATE for gate source selection from device data sheet.
- Synchronized comparator output should not be used in conjunction with synchronized input clock.
1.6.2 Using TMR0 in 8-bit Mode with Periodic Interrupt
This example describes how to configure Timer0 in 8-bit mode and to generate a compare interrupt every 100 ms using LFINTOSC as clock source. A GPIO pin (the development board’s on-board LED) will be configured as output and toggled each time the interrupt occurs. Additionally, the main clock will use a separate clock source (HFINTOSC) and Timer0 will run asynchronously from the main clock.
- System clock initialization
- Port initialization
- Timer0 initialization
- Interrupts initialization
- Timer0 interrupt handling
1.6.2.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC), follow the next steps:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open MCC from the toolbar (more information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 1 MHz
- Clock Divider: 1
- In the Watchdog Timer Enable field in the WWDT tab, WDT Disabled has to be selected
- In the Programming tab, Low-Voltage Programming Enable has to be checked
- From the Device Resources window, add
TMR0 and do the following configurations:
Timer0 Configuration:
- Enable Timer: checked
- Timer Clock tab
- Clock Source: LFINTOSC
- Clock Prescaler: 1:16
- Postscaler: 1:1
- Timer mode: 8-bit
- Enable Synchronization: unchecked
- Timer period: 100 ms
- Enable Timer Interrupt: checked
- Open Pin Manager → Grid
View window and select UQFN40 in the MCU package field and
make the following pin configuration:
- Set Port E pin 0 (RE0) as output
Figure 1-39 1-40 1-41 1-42 1-43 1-44 1-45 1-46 1-47. Pin Mapping 
- Click Pin Module in the Project Resources and set the custom name for RE0 to LED0.
- Click Generate in the Project Resources tab.
- In the
main.cfile generated by MCC, change or add the following code:- Enable the global and peripheral interrupts
- Add the TMR0 Interrupt function
- Set the TMR0 interrupt handler initializer
void TMR0_compareInterrupt(void); void main(void) { // Initialize the device SYSTEM_Initialize(); // Enable the Global Interrupts INTERRUPT_GlobalInterruptEnable(); // Enable the Peripheral Interrupts INTERRUPT_PeripheralInterruptEnable(); TMR0_SetInterruptHandler(TMR0_compareInterrupt); while (1) { // Add your application code } } void TMR0_compareInterrupt(void) { LED0_Toggle(); }

1.6.2.2 Bare Metal Code
First, the Watchdog Timer has to be disabled and Low-Voltage Programming (LVP) has to be enabled using the following pragma code:
#pragma config WDTE = OFF /* WDT operating mode->WDT Disabled */ #pragma config LVP = ON /* Low voltage programming enabled, RE3 pin is MCLR */
The following function initializes the system clock to have the HFINTOSC oscillator as input clock and to run at 1 MHz:
static void CLK_Initialize(void) { OSCCON1 = 0x60; /* set HFINTOSC as new oscillator source */ OSCFRQ = 0x00; /* set HFFRQ to 1 MHz */ }
The following function initializes the RE0 pin (corresponding to the on-board LED0) as output pin:
static void PORT_Initialize(void) { TRISEbits.TRISE0 = 0; /* configure RE0 as output */ }
The following function initializes Timer0 in 8-bit mode, sets the prescaler to 1:16, loads TMR0H and TMR0L registers, clears the Interrupt flag, and enables the interrupt and Timer0:
static void TMR0_Initialize(void)
{
T0CON1 = 0x94; /* Select LFINTOSC, set the prescaler to 1:16, Disable TMR0 sync */
TMR0H = 0xC1; /* Load the compare value to TMR0H */
TMR0L = 0x00; /* Load the reset value to TMR0L */
PIR0bits.TMR0IF = 0; /* clear the interrupt flag */
PIE0bits.TMR0IE = 1; /* enable TMR0 interrupt */
T0CON0 = 0x80; /* Configure TMR0 in 8-bit mode and enable TMR0 */
}
The following function enables the global and peripheral interrupts:
static void INTERRUPT_Initialize(void) { INTCONbits.GIE = 1; /* Enable the Global Interrupts */ INTCONbits.PEIE = 1; /* Enable the Peripheral Interrupts */ }
static void TMR0_ISR(void)
{
PIR0bits.TMR0IF = 0; /* clear the TMR0 interrupt flag */
LATEbits.LATE0 = ~LATEbits.LATE0; /* toggle LED0 */
}
void __interrupt() INTERRUPT_InterruptManager (void)
{
/* Check if TMR0 interrupt is enabled and if the interrupt flag is set */
if(PIE0bits.TMR0IE == 1 && PIR0bits.TMR0IF == 1)
{
TMR0_ISR();
}
}
void main(void)
{
CLK_Initialize();
PORT_Initialize();
TMR0_Initialize();
INTERRUPT_Initialize();
while(1)
{
;
}
}
1.6.3 Using and Operating TMR0 in 16-bit Mode while the Microcontroller is in Sleep
This example describes how to configure TMR0 in 16-bit mode and generate an overflow interrupt every ten seconds, using LFINTOSC as clock source. TMR0 will run while the microcontroller is in Sleep mode. A GPIO pin (the development board’s on-board LED) will be configured as output. When the interrupt occurs, the microcontroller is woken up and the LED is lit for 100 ms and then the microcontroller is put back to Sleep.
To achieve the functionality described by the use case, the following actions will have to be performed:
- System clock initialization
- Port initialization
- Timer0 initialization
- Interrupts initialization
- Timer0 interrupt handling
1.6.3.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC), follow the next steps:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open MCC from the toolbar (more information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 1 MHz
- Clock Divider: 1
- In the Watchdog Timer Enable field in the WWDT tab, WDT Disabled has to be selected
- In the Programming tab, Low-Voltage Programming Enable has to be checked
- From the Device Resources window, add
TMR0 and do the following configurations:
Timer0 Configuration:
- Enable Timer: checked
- Timer Clock tab
- Clock Source: LFINTOSC
- Clock Prescaler: 1:32
- Postscaler: 1:1
- Timer mode: 16-bit
- Enable Synchronization: unchecked
- Timer period: 10s
- Enable Timer Interrupt: checked
- Open Pin Manager → Grid
View window and select UQFN40 in the MCU package field and
make the following pin configuration:
- Set Port E pin 0 (RE0) as output
Figure 1-39 1-40 1-41 1-42 1-43 1-44 1-45 1-46 1-47. Pin Mapping 
- Click Pin Module in the Project Resources and set the custom name for RE0 to LED0.
- Click Generate in the Project Resources tab.
- In the
main.cfile generated by MCC, change or add the following code:- Enable the Global and Peripheral interrupts
- Light up LED0, wait 100 ms, turn off LED0 and put the microcontroller to Sleep
-
void main(void) { // Initialize the device SYSTEM_Initialize(); // Enable the Global Interrupts INTERRUPT_GlobalInterruptEnable(); // Enable the Peripheral Interrupts INTERRUPT_PeripheralInterruptEnable(); while (1) { LED0_SetLow(); __delay_ms(100); LED0_SetHigh(); SLEEP(); } }
1.6.3.2 Bare Metal Code
First, the Watchdog Timer has to be disabled and Low-Voltage Programming (LVP) has to be enabled using the following pragma code:
#pragma config WDTE = OFF /* WDT operating mode->WDT Disabled */ #pragma config LVP = ON /* Low voltage programming enabled, RE3 pin is MCLR */
The following function initializes the system clock to have the HFINTOSC oscillator as input clock and to run at 1 MHz:
static void CLK_Initialize(void) { OSCCON1 = 0x60; /* set HFINTOSC as new oscillator source */ OSCFRQ = 0x00; /* set HFFRQ to 1 MHz */ }
The following function initializes the RE0 pin (corresponding to the on-board LED0) as output pin:
static void PORT_Initialize(void) { TRISEbits.TRISE0 = 0; /* configure RE0 as output */ }
The following function initializes Timer0 in 16-bit mode, sets the prescaler to 1:32, loads the TMR0H and TMR0L registers, clears the Interrupt flag and enables the interrupt and Timer0:
static void TMR0_Initialize(void)
{
T0CON1 = 0x95; /* select LFINTOSC, disable TMR0 sync, set prescaler to 1:32 */
TMR0H = 0xDA; /* set TMR0H reload value */
TMR0L = 0x29; /* set TMR0L reload value */
PIR0bits.TMR0IF = 0; /* clear the interrupt flag */
PIE0bits.TMR0IE = 1; /* enable TMR0 interrupt */
T0CON0 = 0x90; /* configure TMR0 in 16-bit mode and enable TMR0 */
}
The following function enables the Global and Peripheral interrupts:
static void INTERRUPT_Initialize(void) { INTCONbits.GIE = 1; /* Enable the Global Interrupts */ INTCONbits.PEIE = 1; /* Enable the Peripheral Interrupts */ }
static void TMR0_ISR(void)
{
PIR0bits.TMR0IF = 0; /* clear the TMR0 interrupt flag */
TMR0H = 0xDA; /* set TMR0H reload value */
TMR0L = 0x29; /* set TMR0L reload value */
}
void __interrupt() INTERRUPT_InterruptManager(void)
{
/* Check if TMR0 interrupt is enabled and if the interrupt flag is true */
if(PIE0bits.TMR0IE == 1 && PIR0bits.TMR0IF == 1)
{
TMR0_ISR();
}
}
SLEEP() instruction. Additionally, prior to the main function, the
_XTAL_FREQ symbol must be defined and set to 1000000 (equivalent to the 1 MHz system
frequency) for the use of the __delay_ms()
function:#define _XTAL_FREQ 1000000UL
void main(void)
{
CLK_Initialize();
PORT_Initialize();
TMR0_Initialize();
INTERRUPT_Initialize();
while(1)
{
LATEbits.LATE0 = 0; /* turn LED ON */
__delay_ms(100); /* wait 100 ms */
LATEbits.LATE0 = 1; /* turn LED OFF */
SLEEP();
}
}
1.6.4 Using TMR0 in 8-bit Mode and to Generate an Output Signal
This example describes how to configure TMR0 in 8-bit mode, using LFINTOSC as clock source. A GPIO pin will be configured as output and a 125 Hz signal will be generated on the GPIO pin using the Peripheral Pin Select (PPS).
To achieve the functionality described by this use case, the following actions will have to be performed:
- System clock initialization
- Port initialization
- Timer0 initialization
- Peripheral Pin Select initialization
1.6.4.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC), follow the next steps:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open MCC from the toolbar (more information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 1 MHz
- Clock Divider: 1
- In the Watchdog Timer Enable field in the WWDT tab, WDT Disabled has to be selected
- In the Programming tab, Low-Voltage Programming Enable has to be checked
- From the Device Resources window, add
TMR0 and make the following configurations:
Timer0 Configuration:
- Enable Timer: checked
- Timer Clock tab
- Clock Source: LFINTOSC
- Clock Prescaler: 1:1
- Postscaler: 1:1
- Timer mode: 8-bit
- Enable Synchronization: unchecked
- Timer period: 4 ms
- Enable Timer Interrupt: unchecked
- Open Pin Manager → Grid
View window and select UQFN40 in the MCU package field and
make the following pin configuration:
- Set Port C pin 2 (RE0) as output
Figure 1-39 1-40 1-41 1-42 1-43 1-44 1-45 1-46 1-47. Pin Mapping 
- Click Generate in the Project Resources tab.
1.6.4.2 Bare Metal Code
First, the Watchdog Timer has to be disabled and Low-Voltage Programming (LVP) has to be enabled using the following pragma code:
#pragma config WDTE = OFF /* WDT operating mode->WDT Disabled */ #pragma config LVP = ON /* Low voltage programming enabled, RE3 pin is MCLR */
The following function initializes the system clock to have the HFINTOSC oscillator as input clock and to run at 1 MHz:
static void CLK_Initialize(void) { OSCCON1 = 0x60; /* set HFINTOSC as new oscillator source */ OSCFRQ = 0x00; /* set HFFRQ to 1 MHz */ }
The following function initializes the RC2 pin as output pin:
static void PORT_Initialize(void) { TRISCbits.TRISC2 = 0; /* configure RC2 as output */ }
The following function initializes Timer0 in 8-bit mode, sets the prescaler to 1:1, loads the TMR0H and TMR0L registers, clears the Interrupt flag and enables Timer0:
static void TMR0_Initialize(void)
{
T0CON1 = 0x90; /* select LFINTOSC and disable TMR0 sync*/
TMR0H = 0x7B; /* load TMR0H */
TMR0L = 0x00; /* load TMR0L */
PIR0bits.TMR0IF = 0; /* clear the interrupt flag */
T0CON0 = 0x80; /* enable TMR0 */
}
The following function configures the TMR0 output to RC2 in PPS:
static void PPS_Initialize(void) { RC2PPS = 0x13; /* configure RC2 for TMR0 output */ }
void main(void)
{
CLK_Initialize();
PORT_Initialize();
TMR0_Initialize();
PPS_Initialize();
while(1)
{
;
}
}
1.6.5 Using TMR1 Gate to Measure Frequency
This example describes how to initialize and use the TMR1 in Gate-Single Pulse and Toggle combined mode. The timer will start counting on an incrementing edge, will measure a full-cycle length of a gate signal and will stop when a new incrementing edge appears. An interrupt will be generated when the measurement is completed. A GPIO pin will be configured as input and the periodical signal will be applied on this pin.
In this example, the microcontroller was configured with a clock system of 32 MHz and the timer was configured with a clock source frequency of 1 MHz and is able to measure the following range of values:
- The smallest frequency value: This is based on the number of values that the timer can count. It is a 16-bit timer so it can count up to 65,535, resulting in a frequency of approximately 15.26 Hz.
- The biggest frequency value: This is based on the Nyquist frequency theorem. The sampling frequency must be at least two times bigger than the one of the measured signal to obtain a more accurate result. This results in a frequency of approximately 500 kHz.
- System clock initialization
- Port initialization
- Timer1 initialization
- Interrupts initialization
- Timer1 gate interrupt handling
1.6.5.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC), follow the next steps:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open MCC from the toolbar (more information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 32 MHz
- Clock Divider: 1
- In the Watchdog Timer Enable field in the WWDT tab, WDT Disabled has to be selected.
- In the Programming tab, Low-Voltage Programming Enable has to be checked
- From the Device Resources window, add
TMR1 and make the following configurations:
Timer1 Configuration:
- Enable Timer: checked
- Timer Clock tab
- Clock Source: FOSC/4
- Prescaler: 1:8
- Enable Gate tab:
checked
- Enable Gate Toggle: checked
- Enable Gate Single-Pulse mode: checked
- Enable Timer Gate Interrupt: checked
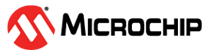
- Open Pin Manager → Grid
View window and select UQFN40 in the MCU package field and
make the following pin configurations to enable the internal signal access to the
I/O:
Figure 1-39 1-40 1-41 1-42 1-43 1-44 1-45 1-46 1-47. Pin Mapping 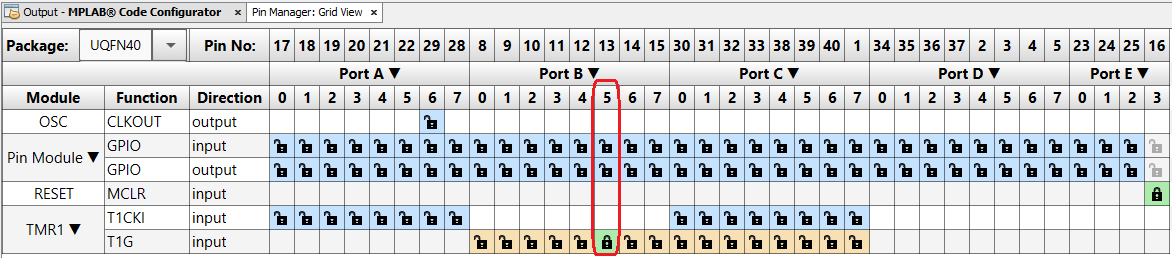
- Click Generate in the Project Resources tab.
- For this example, some extra code is required aside from the one generated from
MCC.
- The Global and Peripheral
interrupts need to be enabled in the
main.cfile. The macros were created by the MCC and the user needs to remove the “//” so they are no longer treated as comments:// Enable the Global Interrupts INTERRUPT_GlobalInterruptEnable(); // Enable the Peripheral Interrupts INTERRUPT_PeripheralInterruptEnable(); - In the
tmr1.cfile, theTMR1_GATE_ISR()function needs to be updated to clear the Interrupt flag, read the counted value, reset it afterward and re-enable the timer gate control for a new acquisition. The following configuration is used:void TMR1_GATE_ISR(void) { volatile uint16_t value = 0; PIR5 &= ~(_PIR5_TMR1GIF_MASK); value = TMR1_ReadTimer(); TMR1_WriteTimer(0); T1GCON |= _T1GCON_T1GGO_MASK; }
- The Global and Peripheral
interrupts need to be enabled in the
1.6.5.2 Bare Metal Code
The functions and code necessary to implement the example discussed are analyzed in this section.
The first step will be to configure the microcontroller to disable the Watchdog Timer and to enable Low-Voltage Programming (LVP).
#pragma config WDTE = OFF /* WDT operating mode->WDT Disabled */
#pragma config LVP = ON /* Low voltage programming enabled, RE3 pin is MCLR */ As described in the example functionality, an initialization of peripherals must be added to the project: TMR1, the system clock, the GPIO pin and the interrupts.
The system clock was configured to use the HFINTOSC oscillator with an internal frequency of 32 MHz. The following function is used:
/* Clock initialization function */ static void CLK_Initialize(void) { /* set HFINTOSC as new oscillator source */ OSCCON1bits.NOSC = 0x6; /* set HFFRQ to 32MHz */ OSCFRQbits.HFFRQ = 0x6; }
The GPIO peripheral was configured to use PINB5 as input for the signal that needs to be measured. The following function is used:
/* Port initialization function */ static void PORT_Initialize(void) { /* configure RB5 as input */ TRISBbits.TRISB5 = 1; /* configure RB5 as digital */ ANSELBbits.ANSELB5 = 0; }
The TMR1 peripheral was configured in Gate Single-Pulse and Toggle combined mode, has a clock source of 1 MHz, the counter is active on a trailing edge and the peripheral’s gate interrupt is Active. The following function is used:
/* TMR1 initialization function */
static void TMR1_Initialize(void)
{
/* Timer controlled by gate function */
T1GCONbits.GE = 1;
/* Timer gate toggle mode enabled */
T1GCONbits.GTM = 1;
/* Timer gate active high */
T1GCONbits.GPOL = 1;
/* Timer acquistion is ready */
T1GCONbits.GGO_nDONE = 1;
/* Timer gate single pulse mode enabled */
T1GCONbits.T1GSPM = 1;
/* Source Clock FOSC/4 */
T1CLKbits.CS = 0x1;
/* Clearing gate IF flag before enabling the interrupt */
PIR5bits.TMR1GIF = 0;
/* Enabling TMR1 gate interrupt */
PIE5bits.TMR1GIE = 1;
/* CLK Prescaler 1:8 */
T1CONbits.CKPS = 0x3;
/* TMR1 enabled */
T1CONbits.ON = 1;
}The microcontroller’s interrupts were enabled and are used to determine when the signal measurement is done. The following function is used:
/* Interrupt initialization function */ static void INTERRUPT_Initialize(void) { /* Enable the Global Interrupts */ INTCONbits.GIE = 1; /* Enable the Peripheral Interrupts */ INTCONbits.PEIE = 1; }
When the timer finishes measuring the frequency of the external signal, an interrupt will occur in the interrupt manager. It will check for the source of the interrupt and, if it is from TMR1 gate, will call a handler function. The following function is used:
/* Interrupt handler function */ static void __interrupt() INTERRUPT_InterruptManager(void) { // interrupt handler if(INTCONbits.PEIE == 1) { if(PIE5bits.TMR1GIE == 1 && PIR5bits.TMR1GIF == 1) { TMR1_GATE_ISR(); } else { //Unhandled Interrupt } } else { //Unhandled Interrupt } }
The handler needs to clear the Interrupt flag, read the counted value and reset it afterward, and re-enable the timer gate control for a new acquisition. The following function is used:
/* TMR1 gate ISR function */ static void TMR1_GATE_ISR(void) { volatile uint16_t value = 0; /* Clearing gate IF flag */ PIR5bits.TMR1GIF = 0; /* Read TMR1 value */ value = TMR1_readTimer(); /* Reset the counted value */ TMR1_writeTimer(0); /* Prepare for next read */ T1GCONbits.GGO_nDONE = 1; } static uint16_t TMR1_readTimer(void) { /* Return TMR1 value */ return ((uint16_t)TMR1H << 8) | TMR1L; } static void TMR1_writeTimer(uint16_t timerValue) { /* Write TMR1H value */ TMR1H = timerValue >> 8; /* Write TMR1L value */ TMR1L = timerValue; }
1.6.6 Using TMR1 to Trigger a Special Event
This example describes how to initialize and use the TMR1 as a counter. The Capture/Compare/PWM (CCP) module will be configured with a user-defined value. A GPIO pin will be configured as output and the event will toggle the logic value of this pin. The event will be triggered when the counted value from TMR1 will be equal with the CCP value.
In this example, the microcontroller was configured with a clock system of 1 MHz and the timer was configured with a clock source frequency of 250 kHz. It is a 16-bit timer so it can count up to 65,535. The CCP value was set to 4,095 in this example. When the counter reaches this value, an event will occur which will be strictly handled by the hardware peripheral, without any software and load on the core.
The event can be configured to clear or not clear the timer counter value and, if the GPIO pin should be set high, set low or toggled every time the event is triggered. In this example, the event will toggle the GPIO pin and will not clear the timer, so the timer counted value will overflow when reaches the 65,535 maxim value and will restart counting from zero. Thus, even when a value was predefined for CCP, the event will be triggered with a frequency of 250 kHz / 65,535 ~ = 3.81 Hz.
- System clock initialization
- PPS initialization
- Port initialization
- Timer1 initialization
- CCP initialization
1.6.6.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC), follow the next steps:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open MCC from the toolbar (more information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 32 MHz
- Clock Divider: 32
- In the Watchdog Timer Enable field in the WWDT tab, WDT Disabled has to be selected.
- From the Device Resources window, add
TMR1 and CCP1. Make the following configurations for each peripheral:
- TMR1 Configuration:
- Enable Timer: checked
- Timer Clock
tab
- Clock Source: FOSC/4
- Prescaler: 1:1
- Enable Synchronization: Checked
- CCP1 Configuration:
- Enable CCP: Checked
- CCP Mode tab:
Compare
- Select Timer: Timer1
- Compare Mode: Toggle_
- TMR1 Configuration:
- Open Pin Manager → Grid
View window and select UQFN40 in the MCU package field and
make the following pin configuration to enable the internal signal access to the
I/O:
Figure 1-39 1-40 1-41 1-42 1-43 1-44 1-45 1-46 1-47. Pin Mapping 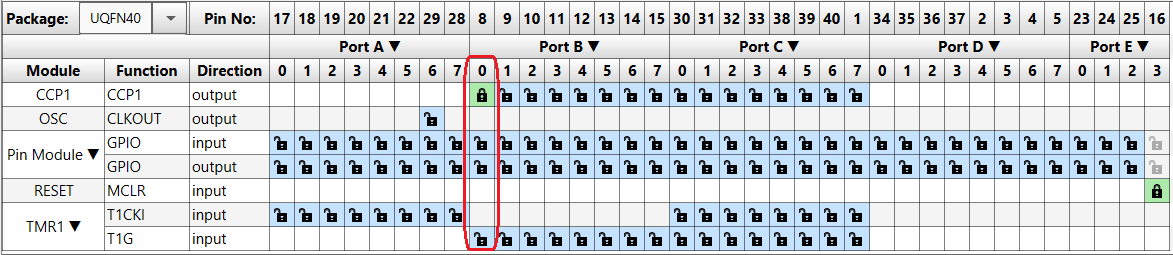
- Click Generate in the Project Resources tab.
1.6.6.2 Bare Metal Code
The functions and code necessary to implement the example discussed are analyzed in this section.
The first step will be to configure the microcontroller to disable the Watchdog Timer and to enable Low-Voltage Programming (LVP).
#pragma config WDTE = OFF /* WDT operating mode->WDT Disabled */
#pragma config LVP = ON /* Low voltage programming enabled, RE3 pin is MCLR */ As described in the example functionality, an initialization of peripherals must be added to the project: TMR1, the system clock and the GPIO pin.
The system clock was configured to use the HFINTOSC oscillator with an internal frequency of 32 MHz and the clock divided by 32, so the actual system frequency is 1 MHz. The following function is used:
/* Clock initialization function */ static void CLK_Initialize(void) { /* set HFINTOSC as new oscillator source */ OSCCON1bits.NOSC = 0x6; /* set Clock Div by 32 */ OSCCON1bits.NDIV = 0x5; /* set HFFRQ to 32MHz */ OSCFRQbits.HFFRQ = 0x6; }
The GPIO peripheral was configured to use PINB0 as output for the event triggered by CCP. The following function is used:
/* PPS initialization function */ static void PPS_Initialize(void) { /* Configure RB0 for CCP1 output */ RB0PPS = 0x05; } /* Port initialization function */ static void PORT_Initialize(void) { /* Set RB0 as output */ TRISBbits.TRISB0 = 0; }
The TMR1 peripheral was configured as a normal counter. The following function is used:
/* TMR1 initialization function */
static void TMR1_Initialize(void)
{
/* Set timer Source Clock to FOSC/4 */
T1CLKbits.CS = 0x1;
/* Enable timer */
T1CONbits.ON = 1;
}The CCP1 peripheral was configured to toggle a GPIO pin when the TMR1 counted value is equal with the CCP value. The following function is used:
/* CCP1 initialization function */ static void CCP1_Initialize(void) { /* Select TMR1 as input for CCP1*/ CCPTMRSbits.C1TSEL = 0x1; /* Set the high value for compare */ CCPR1H = 0x0F; /* Set the low value for compare */ CCPR1L = 0xFF; /* Compare mode with toggle*/ CCP1CONbits.CCP1MODE = 0x2; /* Enable CCP1 */ CCP1CONbits.EN = 1; }
1.6.7 Using TMR1 Gate to Measure Short vs. Long Button Press
This example describes how to initialize and use the TMR1 in Gate Single-Pulse mode. The timer will start counting on an falling edge. If the leading edge appears, a gate interrupt will be generated, denoting that the button was short pressed. If the timer overflows before the leading edge appears, an overflow interrupt will be generated, denoting that the button was long pressed. A GPIO pin will be configured as input and connected to a button.
In this example, the microcontroller was configured with a clock system of 1 MHz and the timer was configured with a clock source frequency of 31,250 MHz = 32 µs and is able to measure the following range of values:
- The smallest pressed time: This is based on the clock frequency of the timer, resulting in a minimum time of 1 / 31,250 Hz = 32 µs.
- The biggest pressed time: This is based on the maximum value the timer can count. It is a 16-bit timer so it can count up to 65,535. Thus, resulting in a minimum time of 32 µs * 65,535 ~ = 2.1 s. A longer press will result in a timer overflow.
- System clock initialization
- Port initialization
- Timer1 initialization
- Interrupts initialization
- Timer1 interrupt handling
- Timer1 gate interrupt handling
1.6.7.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC), follow the next steps:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open MCC from the toolbar (more information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 32 MHz
- Clock Divider: 32
- In the Watchdog Timer Enable field, in the WWDT tab, WDT Disabled has to be selected.
- From the Device Resources window, add
TMR1 and do the following configurations:
- Enable Timer: checked
- Timer Clock tab
- Clock Source: FOSC/4
- Prescaler: 1:8
- Enable Gate tab:
checked
- Enable Gate Toggle: checked
- Enable Gate Single-Pulse mode: checked
- Gate Polarity: Low
- Enable Timer Interrupt: Checked
- Enable Timer Gate Interrupt: Checked
- Open Pin Manager → Grid
View window and select UQFN40 in the MCU package field and
make the following pin configuration to enable the internal signal access to the
I/O:
Figure 1-39 1-40 1-41 1-42 1-43 1-44 1-45 1-46 1-47. Pin Mapping
- Click Generate in the Project Resources tab.
- For this example, some extra code is required aside from the one generated from
MCC.
- The Global and Peripheral
interrupts need to be enabled in the
main.cfile. The macros were created by the MCC and the user needs to remove the “//” so they are no longer treated as comments:// Enable the Global Interrupts INTERRUPT_GlobalInterruptEnable(); // Enable the Peripheral Interrupts INTERRUPT_PeripheralInterruptEnable(); - In the
tmr1.cfile, theTMR1_ISR()function needs to be updated to stop the gate control because the button was not released yet and it will generate an undesired interrupt when that will happen. It also needs to clear the Interrupt flag, reset the counted value and re-enable the timer gate control for a new acquisition. The following function is used:void TMR1_ISR(void) T1GCON &= ~_T1GCON_T1GGO_MASK; PIR4 &= ~_PIR4_TMR1IF_MASK; PIR5 &= ~_PIR5_TMR1GIF_MASK; TMR1_WriteTimer(0); T1GCON |= _T1GCON_T1GGO_MASK; if(TMR1_InterruptHandler) { TMR1_InterruptHandler(); } } - In the
tmr1.cfile, theTMR1_GATE_ISR()function needs to be updated to clear the Interrupt flag, reset the counted value and re-enable the timer gate control for a new acquisition. The following function is used:void TMR1_GATE_ISR(void) { PIR5 &= ~(_PIR5_TMR1GIF_MASK); TMR1_WriteTimer(0); T1GCON |= _T1GCON_T1GGO_MASK; }
- The Global and Peripheral
interrupts need to be enabled in the
1.6.7.2 Bare Metal Code
The functions and code necessary to implement the example discussed are analyzed in this section.
The first step will be to configure the microcontroller to disable the Watchdog Timer and to enable Low-Voltage Programming (LVP):
#pragma config WDTE = OFF /* WDT operating mode->WDT Disabled */
#pragma config LVP = ON /* Low voltage programming enabled, RE3 pin is MCLR */ As described in the example functionality, the following peripherals must be initialized: TMR1, the system clock, the GPIO pin and the interrupts.
The system clock was configured to use the HFINTOSC oscillator with an internal frequency of 32 MHz and the clock divided by 32, so the actual system frequency is 1 MHz. The following function is used:
/* Clock initialization function */ static void CLK_Initialize(void) { /* set HFINTOSC as new oscillator source */ OSCCON1bits.NOSC = 0x6; /* set Clock Div by 32 */ OSCCON1bits.NDIV = 0x5; /* set HFFRQ to 32MHz */ OSCFRQbits.HFFRQ = 0x6; }
The GPIO peripheral was configured to use PINB5 as input for TMR1 button. The following function is used:
/* Port initialization function */ static void PORT_Initialize(void) { /* configure RB5 as input */ TRISBbits.TRISB5 = 1; /* configure RB5 as digital */ ANSELBbits.ANSELB5 = 0; }
The TMR1 peripheral is configured in Gate Single-Pulse mode, has a clock source of 1 MHz, the counter is active on a falling edge and the peripheral gate and overflow interrupts are Active. The following function is used:
/* TMR1 initialization function */
static void TMR1_Initialize(void)
{
/* Timer controlled by gate function */
T1GCONbits.GE = 1;
/* Timer acquistion is ready */
T1GCONbits.GGO_nDONE = 1;
/* Timer gate single pulse mode enabled */
T1GCONbits.T1GSPM = 1;
/* Source Clock FOSC/4 */
T1CLKbits.CS = 0x1;
/* Clearing IF flag before enabling the interrupt */
PIR4bits.TMR1IF = 0;
/* Enabling TMR1 interrupt */
PIE4bits.TMR1IE = 1;
/* Clearing gate IF flag before enabling the interrupt */
PIR5bits.TMR1GIF = 0;
/* Enabling TMR1 gate interrupt */
PIE5bits.TMR1GIE = 1;
/* CLK Prescaler 1:8 */
T1CONbits.CKPS = 0x3;
/* TMR1 enabled */
T1CONbits.ON = 1;
}The microcontroller’s interrupts were enabled and are used to determine the button press time. The following function is used:
/* Interrupt initialization function */ static void INTERRUPT_Initialize(void) { /* Enable the Global Interrupts */ INTCONbits.GIE = 1; /* Enable the Peripheral Interrupts */ INTCONbits.PEIE = 1; }
/* Interrupt handler function */
static void __interrupt() INTERRUPT_interruptManager(void)
{
// interrupt handler
if(INTCONbits.PEIE == 1)
{
if(PIE4bits.TMR1IE == 1 && PIR4bits.TMR1IF == 1)
{
TMR1_ISR();
}
else if(PIE5bits.TMR1GIE == 1 && PIR5bits.TMR1GIF == 1)
{
TMR1_GATE_ISR();
}
else
{
//Unhandled Interrupt
}
}
else
{
//Unhandled Interrupt
}
}/* TMR1 ISR function */
static void TMR1_ISR(void)
{
/* Stop Gate control */
T1GCONbits.GGO_nDONE = 0;
/* Clearing overflow IF flag */
PIR4bits.TMR1IF = 0;
/* Clearing gate IF flag */
PIR5bits.TMR1GIF = 0;
/* Reset the counted value */
TMR1_writeTimer(0);
/* Prepare for next read */
T1GCONbits.GGO_nDONE = 1;
}/* TMR1 GATE ISR function */
static void TMR1_GATE_ISR(void)
{
/* Clearing gate IF flag after button release */
PIR5bits.TMR1GIF = 0;
/* Reset the counted value */
TMR1_writeTimer(0);
/* Prepare for next read */
T1GCONbits.GGO_nDONE = 1;
}0’. The following function is
used:static void TMR1_writeTimer(uint16_t timerValue)
{
/* Write TMR1H value */
TMR1H = timerValue >> 8;
/* Write TMR1L value */
TMR1L = timerValue;
}
1.6.8 Using TMR2 for Auto-Conversion Trigger for the ADCC Module
This example will present how to use the TMR2 peripheral to trigger the ADCC to make conversions at a fixed frequency rate that can be adjusted by modifying the TMR2 period.
The application will blink the LED0 with a rate of Timer2 period (100 ms), get the ADCC value and compare it with a desired threshold and, if it is higher, the LED0 will stop blinking.
This example uses the PIC18F47Q10 Curiosity Nano board with a POT click, both inserted into a Curiosity Nano adapter. For more details, visit the Hardware Configuration section in the GitHub repository.
- System clock initialization
- ADCC initialization and reading
- Port initialization
- Timer2 initialization
- Interrupts handling and initialization
1.6.8.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC), follow the next steps:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open MCC from the toolbar (more information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 1 MHz
- Clock Divider: 1
- In the Watchdog Timer Enable field in the WWDT tab, WDT Disabled has to be selected
- In the Programming tab, Low-Voltage Programming Enable has to be checked
- From the Device Resources window, add
TMR2 and ADCC and then make the following configurations:
Timer2 Configuration:
- Enable Timer: checked
- Control Mode: Roll over pulse
- Start/Reset Option: Software control
- Timer Clock tab
- Clock Source: LFINTOSC
- Clock Prescaler: 1:64
- Postscaler: 1:1
- Set 100 ms period in the Timer Period tab
ADCC Configuration:
- Enable ADCC: checked
- Operating: Basic mode
- In the ADC tab choose
the following options:
- ADC Clock → Clock Source: Select FRC
- Auto-conversion Trigger: Select TMR2
- CVD Features tab:
- Enable ADC Interrupt: checked
- Open Pin Manager → Grid
View window and select UQFN40 in the MCU package field and select
the I/O pins outputs to enable the internal signal access to the I/O.
Figure 1-39 1-40 1-41 1-42 1-43 1-44 1-45 1-46 1-47. Pin Mapping 
- Click Pin Module in the Project Resources and set the custom name for RE0 to LED0, select Output box and for the ANA0 pin select the Analog box.
- Click Generate in the Project Resources tab.
- Add into the
main.cfile, the following lines of code:#define DesiredThreshold 300 /* Desired threshold value */ volatile uint16_t adcVal; static void ADCC_interrupt(void); static void ADCC_interrupt(void) { /* Toggle LED0 at the Timer2Period frequency */ LED0_Toggle(); adcVal = ADCC_GetConversionResult(); } void main(void) { // Initialize the device SYSTEM_Initialize(); ADCC_SetADIInterruptHandler(ADCC_Interrupt_by_TMR2); // Enable the Global Interrupts INTERRUPT_GlobalInterruptEnable(); // Enable the Peripheral Interrupts INTERRUPT_PeripheralInterruptEnable(); while (1) { if (adcVal > DesiredThreshold) { LED0_SetLow(); } } }
1.6.8.2 Bare Metal Code
The first step will be to configure the microcontroller to disable the Watchdog Timer and to enable Low-Voltage Programming (LVP):
#pragma config WDTE = OFF /*disable Watchdog*/
#pragma config LVP = ON /* Low voltage programming enabled, RE3 pin is MCLR */Then, the following variables need to be defined:
#define Timer2Period 0x2F /* TMR2 Period is 100ms */ #define DesiredThreshold 300 /* Desired threshold value */ #define AnalogChannel 0x00 /* Use ANA0 as input for ADCC */ volatile uint16_t adcVal; /* ADCC global result value */
The CLK_Initialize function initializes the HFINTOSC
internal oscillator:
static void CLK_Initialize(void)
{
/* set HFINTOSC Oscillator */
OSCCON1 = 0x60;
/* set HFFRQ to 1 MHz */
OSCFRQ = 0x00;
}The PORT_Initialize function has the role to configure the
pin used in this application, which is the RE0 output for LED0:
static void PORT_Initialize(void) { /* Set RE0 digital input buffer disabled */ ANSELE = 0x06; /* Set RE0 pin as output */ TRISE = 0x06; }
The next function initializes the ADCC and configures the TMR2 to be an auto-conversion trigger and enables the ADCC Interrupt flag:
static void ADCC_Initialize(void)
{
/* ADACT Auto-Conversion Trigger Source is TMR2 */
ADACT = 0x04;
/* ADGO stop; ADFM right; ADON enabled; ADCONT disabled; ADCS FRC */
ADCON0 = 0x94;
/* Clear the ADCC interrupt flag */
PIR1bits.ADIF = 0;
/* Enabling ADCC interrupt flag */
PIE1bits.ADIE = 1;
}The Timer2 initialization function sets the clock source and the registers needed to generate an 100 ms period:
static void TMR2_Initialize(void)
{
/* TMR2 Clock source, LFINTOSC (00100) has 31 kHz */
T2CLKCON = 0x04;
/* T2PSYNC Not Synchronized, T2MODE Software control, T2CKPOL Rising Edge */
T2HLT = 0x00;
/* TMR2ON on; T2CKPS Prescaler 1:64; T2OUTPS Postscaler 1:1
Minimum timer period is 31 kHz/64 = 2.064516 ms */
T2CON = 0xE0;
/* Set TMR2 period, PR2 to 100ms */
T2PR = Timer2Period;
/* Clear the TMR2 interrupt flag */
PIR4bits.TMR2IF = 0;
}The following initialization function will safely enable the Global and Peripherals interrupts, after they were initialized with proper settings:
static void INTERRUPT_Initialize(void)
{
INTCONbits.GIE = 1; /* Enable Global Interrupts */
INTCONbits.PEIE = 1; /* Enable Peripheral Interrupts */
}The ADCC interrupt is triggered by TMR2 to complete a conversion at a frequency
determined by the Timer2 Period. The following function handles the interrupts, in this
case ADCC_Interrupt, checks the status of the ADCC Interrupt flag, and
then calls the ADCC_Interrupt function:
static void __interrupt() INTERRUPT_InterruptManager(void)
{
if (INTCONbits.PEIE == 1)
{
if (PIE1bits.ADIE == 1 && PIR1bits.ADIF == 1)
{
ADCC_Interrupt();
}
}
}
The ADCC_Interrupt function is separated from the interrupt
manager to be similar to the code generated by MCC. In this function, the Interrupt flag
is cleared first, the LED0 is toggled (this will happen with Timer2 Period frequency),
and finally the ADCC value for the Analog Channel is read (ANA0 is used in this
example).
static void ADCC_Interrupt(void)
{
/* Clear the ADCC interrupt flag */
PIR1bits.ADIF = 0;
/* Toggle LED0 at the Timer2Period frequency */
LATEbits.LATE0 = ~LATEbits.LATE0;
/* Get the conversion result from ADCC AnalogChannel */
adcVal = ADCC_ReadValue(AnalogChannel);
}
The ADCC read function only needs a parameter, the channel needed to be read:
static uint16_t ADCC_ReadValue(uint8_t channel)
{
ADPCH = channel; /*Set the input channel for ADCC*/
/* TMR2 is trigger source for auto-conversion for ADCC */
return ((uint16_t)((ADRESH << 8) + ADRESL));
}
The next code in the void main function is an infinite loop
(using a while(1)), which is used to check for the ADCC value using an
“if” statement:
void main(void)
{
/* Initialize the device */
CLK_Initialize(); /* Oscillator Initialize function */
PORT_Initialize(); /* Port Initialize function */
ADCC_Initialize(); /* ADCC Initialize function */
TMR2_Initialize(); /* TMR2 Initialize function */
INTERRUPT_Initialize(); /* Interrupt Initialize function */
while (1)
{
if (adcVal > DesiredThreshold)
{
/* turn LED0 ON by writing pin RE0 to low */
LATEbits.LATE0 = 0;
}
}
}This will check if the read value from Potentiometer (POT click) is above a defined value. If so, the LED0 will turn ON without blinking.
1.6.9 Using TMR4 in One-Shot Mode with External Signal as Reset
This example will present how to use the TMR4 peripheral in One-Shot mode to stop TMR2 if an external pin is pulled to GND for more than the desired period.
The application will blink the LED0 with a rate of Timer2 Period (100 ms) and, if the external pin RC7 is pulled down for more than the Timer4 Period (500 ms), the LED0 will stop blinking.
- System clock initialization
- Port initialization
- PPS initialization
- Timer2 initialization
- Timer4 initialization
- Interrupts handling and initialization
1.6.9.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC), follow the next steps:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open MCC from the toolbar (more information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 1 MHz
- Clock Divider: 1
- In the Watchdog Timer Enable field in the WWDT tab, WDT Disabled has to be selected
- In the Programming tab, Low-Voltage Programming Enable has to be checked
- From the Device Resources window, add
TMR2, TMR4 and make the following configurations:
Timer2 Configuration:
- Enable Timer: checked
- Control Mode: Roll over pulse
- Ext. Reset Source: TMR4_postscaled
- Start/Reset Option: Starts at
T2ON =
1and TMR2_ers =0 - Timer Clock tab
- Clock Source: LFINTOSC
- Clock Prescaler: 1:64
- Postscaler: 1:1
- Set 100 ms period in the
Timer Period tab
- Enabled Timer Interrupt: checked
-
Timer4 Configuration:
- Enable Timer: checked
- Control mode: One shot
- Ext. Reset Source: T4INPPS pin
- Start/Reset Option: Starts at
TMR4_ers =
0and Resets at TMR4_ers =1 - Timer Clock tab:
- Clock Source: LFINTOSC
- Clock Prescaler: 1:64
- Postscaler: 1:1
- Set 500 ms period in the Timer Period tab
- Open Pin Manager → Grid
View window, select UQFN40 in the MCU package field and select the
I/O pins outputs to enable the internal signal access to the I/O.
Figure 1-39 1-40 1-41 1-42 1-43 1-44 1-45 1-46 1-47. Pin Mapping 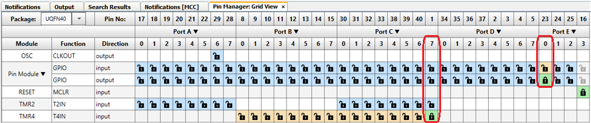
- Click Pin Module in the Project Resources, set the custom name for RE0 to LED0 and select Output box. For RC7 pin, select WPU.
- Click Generate in the Project Resources tab.
- The Interrupt function that will
toggle LED0 at Timer2 period will need to be added before
mainfunction:void TMR2_interrupt(void) { /* Toggle LED0 at the Timer2Period frequency */ LED0_Toggle(); } void main(void) { // Initialize the device SYSTEM_Initialize(); TMR2_SetInterruptHandler(TMR2_interrupt); // Enable the Global Interrupts INTERRUPT_GlobalInterruptEnable(); // Enable the Peripheral Interrupts INTERRUPT_PeripheralInterruptEnable(); while (1) { // Add your application code } }
1.6.9.2 Bare Metal Code
The first step will be to configure the microcontroller to disable the Watchdog Timer (WDT) and to enable Low-Voltage Programming (LVP).
#pragma config WDTE = OFF /*disable Watchdog*/
#pragma config LVP = ON /* Low voltage programming enabled, RE3 pin is MCLR */The following constants need to be defined:
#define Timer2Period 0x2F /* TMR2 Period is 100ms */ #define Timer4Period 0xF1 /* TMR4 Period is 500ms */
The CLK_Initialize function initializes the HFINTOSC
internal oscillator:
static void CLK_Initialize(void)
{
/* set HFINTOSC Oscillator */
OSCCON1 = 0x60;
/* set HFFRQ to 1 MHz */
OSCFRQ = 0x00;
}The PPS_Initialize function has the role to configure the
RC7 peripheral select as input for TMR4:
static void PPS_Initialize(void) { /* Set RC7 as input for TMR4 (T4IN) */ T4INPPS = 0x17; }
PORT_Initialize has the role to configure the RC7, input
channel, and RE0 output for LED0 pins:
static PORT_Initialize(void)
{
/* Set RC7 pin as digital */
ANSELC = 0x7F;
/* Set RE0 pin as output */
TRISE = 0x06;
/* Enable weak pull-up on pin RC7 */
WPUC = 0x80;
}The TMR2_Initialize function sets the clock source and the
registers needed to generate an 100 ms period:
static void TMR2_Initialize(void)
{
/* TMR2 Clock source, LFINTOSC (00100) has 31 kHz */
T2CLKCON = 0x04;
/* T2PSYNC Not Synchronized; T2MODE Starts at T2ON = 1 and TMR2_ers = 0; T2CKPOL Rising Edge */
T2HLT = 0x02;
/* TMR2 external reset is TMR4_postscaled */
T2RST = 0x02;
/* TMR2 ON on; T2 CKPS Prescaler 1:64; T2 OUTPS Postscaler 1:1
Minimum timer period is 31 kHz/64 = 2.064516 ms */
T2CON = 0xE0;
/* Set TMR2 period, PR2 to 100ms */
T2PR = Timer2Period;
/* Clear the TMR2 interrupt flag */
PIR4bits.TMR2IF = 0;
/* Enabling TMR2 interrupt */
PIE4bits.TMR2IE = 1;
}The TMR4_Initialize function sets the clock source and the
registers needed to generate an 500 ms period:
static void TMR4_Initialize(void)
{
/* TMR4 Clock source, LFINTOSC (00100) has 31 kHz */
T4CLKCON = 0x04;
/* TMR4 in OneShot mode, Starts at TMR4_ers=0 and resets on TMR4_ers=1 */
T4HLT = 0x17;
/* TMR4 External reset signal selected by T4INPPS pin */
T4RST = 0;
/* TMR4 ON on; T4 CKPS Prescaler 1:64; T4 OUTPS Postscaler 1:1
Minimum timer period is 31 kHz/64 = 2.064516 ms */
T4CON = 0xE0;
/* Set TMR4 period, PR4 to 500ms */
T4PR = Timer4Period;
/* Clear the TMR4 interrupt flag */
PIR4bits.TMR4IF = 0;
}The following initialization function will safely enable the Global and Peripherals interrupts, after all modules have been initialized with proper settings:
static void INTERRUPT_Initialize(void)
{
INTCONbits.GIE = 1; /* Enable Global Interrupts */
INTCONbits.PEIE = 1; /* Enable Peripheral Interrupts */
}The next function handles the interrupts (in this case there is only one
interrupt), checks the status of the TMR2 Interrupt flag, and then calls the
TMR2_Interrupt function.
static void __interrupt() INTERRUPT_InterruptManager(void)
{
if (INTCONbits.PEIE == 1)
{
if (PIE4bits.TMR2IE == 1 && PIR4bits.TMR2IF == 1)
{
TMR2_Interrupt();
}
}
}The TMR2_Interrupt clears the Interrupt flag and toggles the
LED0 (this will happen with Timer2 Period frequency).
static void TMR2_Interrupt(void)
{
/* Clear the TMR2 interrupt flag */
PIR4bits.TMR2IF = 0;
/* Toggle LED0 at the Timer2Period frequency */
LATEbits.LATE0 = ~LATEbits.LATE0;
}The void main function contains only the initialization
functions:
void main(void)
{
/* Initialize the device */
CLK_Initialize(); /* Oscillator Initialize function */
PPS_Initialize(); /* Peripheral select Initialize function */
PORT_Initialize(); /* Port Initialize function */
TMR2_Initialize(); /* TMR2 Initialize function */
TMR4_Initialize(); /* TMR4 Initialize function */
INTERRUPT_Initialize(); /* Interrupt Initialize function */
while (1)
{
;/* Add your application code */
}
}If the RC7 pin is pulled to GND for more than the Timer4 Period (500 ms), TMR4 will trigger TMR2 to stop and act as a one-shot Reset.
1.6.10 Using TMR4 as HLT to Generate an Interrupt
This example will present how to use the TMR4 as a Hardware Limit Timer (HLT) in order to generate an interrupt and stop TMR2 that also stops the ADCC auto-conversion.
This application will blink the LED0 with Timer2 Period (100 ms), if the potentiometer value is below a desired threshold, and will keep the LED in an ON state constantly if the potentiometer value is above that value. If the ADCC read value is above the maximum threshold and the RC7 pin is pulled to GND for more than Timer4 Period (500 ms), TMR4 will stop TMR2 and LED0 will blink with a 500 ms period for as long as RC7 is tied to GND.
One practical use for this code example is in a motor control application where the ADCC reads the shunt current at a fixed frequency. The user needs to compare that value with a maximum current and, if it is above for more than a period, then the user will stop the motor since it is consuming too much power.
This example uses the PIC18F47Q10 Curiosity Nano board with a POT Click, both inserted into a Curiosity Nano adapter.
- System clock initialization
- Port initialization
- PPS initialization
- ADCC initialization
- Timer2 initialization
- Timer4 initialization
- Interrupts handling and initialization
1.6.10.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC), follow the next steps:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open MCC from the toolbar (more information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 1 MHz
- Clock Divider: 1
- In the Watchdog Timer Enable field in the WWDT tab, WDT Disabled has to be selected
- In the Programming tab, Low-Voltage Programming Enable has to be checked
- From the Device Resources window, add
TMR2, TMR4, ADCC and do the following configurations:
Timer2 Configuration:
- Enable Timer: checked
- Control Mode: Roll over pulse
- Ext. Reset Source: TMR4_postscaled
- Start/Reset Option: Starts at
T2ON =
1and TMR2_ers =0 - Timer Clock tab
- Clock Source: LFINTOSC
- Clock Prescaler: 1:64
- Postscaler: 1:1
- Set 100 ms period in the Timer Period tab
Timer4 Configuration:
- Enable Timer: checked
- Control Mode: Roll over pulse
- Ext. Reset Source: T4INPPS
- Start/Reset Option: Resets at
TMR4_ers =
1 - Timer Clock tab
- Clock Source: LFINTOSC
- Clock Prescaler: 1:64
- Postscaler: 1:1
- Set 500 ms period in the Timer Period tab
- Enable Timer Interrupt: checked
ADCC Configuration:
- Enable ADC: Checked
- Operating: Basic mode
-
- In the ADC
tab, check the following options:
- ADC Clock → Clock Source: Select FRC
- Auto-conversion Trigger: Select TMR2
- CVD Features
tab:
- Enable ADC Interrupt: checked
- In the ADC
tab, check the following options:
- Open Pin Manager → Grid
View window, select UQFN40 in the MCU package field, and select the
I/O pins outputs to enable the internal signal access to the I/O.
Figure 1-39 1-40 1-41 1-42 1-43 1-44 1-45 1-46 1-47. Pin Mapping 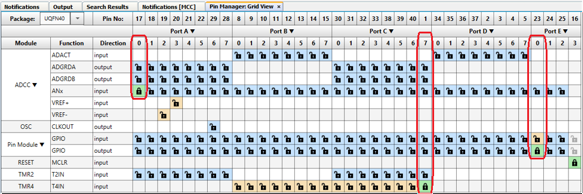
- Go to Project Resources → Pin Module → RA0(ANA0) and select only the Analog box. For the RC7 pin, select WPU, rename IO_RE0 to LED0 and select Output box .
- Click Generate in the Project Resources tab.
- Add these lines into the
main.cfile:#define DesiredThreshold 300 /* Desired threshold value */ #define MaxThreshold 500 /* Maximum threshold value */ volatile uint16_t adcVal; void TMR4_interrupt(void) { /* HLT trigger: if adcVal > MaxThreshold and pin RC7 pulled-down */ if (adcVal > MaxThreshold) { /* Toggle LED0 at the Timer2Period frequency */ LED0_Toggle(); /* HLT will stop TMR2 that also stops ADCC */ TMR2_Stop(); } } void ADCC_interrupt(void) { /* This will toggle at a rate of 10Hz if adcVal < DesiredThreshold */ if (adcVal < DesiredThreshold) { LED0_Toggle(); } adcVal = ADCC_GetConversionResult(); } void main(void) { // Initialize the device SYSTEM_Initialize(); TMR4_SetInterruptHandler(TMR4_interrupt); ADCC_SetADIInterruptHandler(ADCC_interrupt); // Enable the Global Interrupts INTERRUPT_GlobalInterruptEnable(); // Enable the Peripheral Interrupts INTERRUPT_PeripheralInterruptEnable(); while (1) { if ((adcVal > DesiredThreshold)&&(adcVal < MaxThreshold)) { LED0_SetLow(); } } }
1.6.10.2 Bare Metal Code
The application with bare metal code will have the same behavior as the MCC generated code.
The first step will be to configure the microcontroller to disable the Watchdog Timer (WDT) and to enable Low-Voltage Programming (LVP).
#pragma config WDTE = OFF /*disable Watchdog*/
#pragma config LVP = ON /* Low voltage programming enabled, RE3 pin is MCLR */Then, the following variables need to be defined:
#define Timer2Period 0x2F /* TMR2 Period is 100ms */ #define Timer4Period 0xF1 /* TMR4 Period is 500ms */ #define DesiredThreshold 300 /* Desired threshold value */ #define MaxThreshold 500 /* Maximum threshold value */ #define AnalogChannel 0x00 /* Use ANA0 as input for ADCC */ volatile uint16_t adcVal; /* ADCC global result value */
The CLK_Initialize function initializes the HFINTOSC
internal oscillator:
static void CLK_Initialize(void)
{
/* set HFINTOSC Oscillator */
OSCCON1 = 0x60;
/* set HFFRQ to 1 MHz */
OSCFRQ = 0x00;
}The PPS_Initialize function has the role to configure the
RC7 peripheral select as input for TMR4:
static void PPS_Initialize(void) { /* Set RC7 as input for TMR4 (T4IN) */ T4INPPS = 0x17; }
PORT_Initialize configures the RC7 digital input and RE0
output pins used for LED0:
static void PORT_Initialize(void)
{
/* Set RC7 pin as digital */
ANSELC = 0x7F;
/* Set RE0 pin as output */
TRISE = 0x06;
/* Enable weak pull-up on pin RC7 */
WPUC = 0x80;
}ADCC_Initialize configures the TMR2 to be an
auto-conversion trigger and enables the ADCC Interrupt flag:
static void ADCC_Initialize(void)
{
/* ADACT Auto-Conversion Trigger Source is TMR2 */
ADACT = 0x04;
/* ADGO stop; ADFM right; ADON enabled; ADCONT disabled; ADCS FRC */
ADCON0 = 0x94;
/* Clear the ADCC interrupt flag */
PIR1bits.ADIF = 0;
/* Enabling ADCC interrupt flag */
PIE1bits.ADIE = 1;
}The TMR2_Initialize function sets the clock source and the
registers needed to generate an 100 ms period:
static void TMR2_Initialize(void)
{
/* TMR2 Clock source, LFINTOSC (00100) has 31 kHz */
T2CLKCON = 0x04;
/* T2PSYNC Not Synchronized; T2MODE Starts at T2ON = 1 and TMR2_ers = 0; T2CKPOL Rising Edge */
T2HLT = 0x02;
/* TMR2 external reset is TMR4_postscaled */
T2RST = 0x02;
/* TMR2 ON on; T2 CKPS Prescaler 1:64; T2 OUTPS Postscaler 1:1
Minimum timer period is 31 kHz/64 = 2.064516 ms */
T2CON = 0xE0;
/* Set TMR2 period, PR2 to 100ms */
T2PR = Timer2Period;
/* Clear the TMR2 interrupt flag */
PIR4bits.TMR2IF = 0;
}The TMR4_Initialize function sets the clock source and the
registers needed to generate a 500 ms period:
static void TMR4_Initialize(void)
{
/* TMR4 Clock source, LFINTOSC (00100) has 31 kHz */
T4CLKCON = 0x04;
/* T4PSYNC Synchronized; T4MODE Resets at TMR4_ers = 1; T4CKPOL Rising Edge */
T4HLT = 0x87;
/* TMR4 External reset signal by T4INPPS pin */
T4RST = 0;
/* TMR4 ON on; T4 CKPS Prescaler 1:64; T4 OUTPS Postscaler 1:1
Minimum timer period is 31 kHz/64 = 2.064516 ms */
T4CON = 0xE0;
/* Set TMR4 period, PR4 to 500ms */
T4PR = Timer4Period;
/* Clear the TMR4 interrupt flag */
PIR4bits.TMR4IF = 0;
/* Enabling TMR4 interrupt flag */
PIE4bits.TMR4IE = 1;
}The following initialization function will safely enable the Global and Peripherals interrupts, after all modules have been initialized with proper settings:
static void INTERRUPT_Initialize(void)
{
INTCONbits.GIE = 1; /* Enable Global Interrupts */
INTCONbits.PEIE = 1; /* Enable Peripheral Interrupts */
}This function handles the two interrupts, checks the status of the Interrupt
flag, and then calls the TMR4_Interrupt or
ADCC_Interrupt functions:
static void __interrupt() INTERRUPT_manager (void)
{
/* Interrupt handler */
if (INTCONbits.PEIE == 1)
{
if (PIE4bits.TMR4IE == 1 && PIR4bits.TMR4IF == 1)
{
TMR4_Interrupt();
}
else if (PIE1bits.ADIE == 1 && PIR1bits.ADIF == 1)
{
ADCC_Interrupt();
}
}
}The ADCC_Interrupt function first clears the Interrupt flag,
toggles the LED0 (this will happen with Timer2 Period frequency), and then reads the
ANA0 analog channel.
static void ADCC_Interrupt(void)
{
/* Clear the ADCC interrupt flag */
PIR1bits.ADIF = 0;
if (adcVal < DesiredThreshold)
{
/* Toggle LED0 at the Timer2Period frequency */
LATEbits.LATE0 = ~LATEbits.LATE0;
}
/* Get the conversion result from ADCC AnalogChannel */
adcVal = ADCC_ReadValue(AnalogChannel);
}static uint16_t ADCC_ReadValue(uint8_t channel)
{
ADPCH = channel; /* Set the input channel for ADCC */
/* TMR2 is trigger source for auto-conversion for ADCC */
return ((uint16_t)((ADRESH << 8) + ADRESL));
}
The TMR4_Interrupt function first clears the Interrupt flag
(if the ADCC read value is above the maximum threshold and if the RC7 pin is pulled to
GND for more than 500 ms), TMR4 will stop TMR2 and LED0 will blink for a 500 ms period,
as long as RC7 is tied to GND.
static void TMR4_Interrupt(void)
{
/* Clear the TMR4 interrupt flag */
PIR4bits.TMR4IF = 0;
/* HLT trigger condition: if adcVal > MaxThreshold and pin RC7 is pulled-down */
if (adcVal > MaxThreshold)
{
/* Toggle LED0 at the Timer4Period frequency */
LATEbits.LATE0 = ~LATEbits.LATE0;
/* HLT will stop TMR2 that also stops ADCC */
/* Stop the Timer by writing to TMRxON bit */
T2CONbits.TMR2ON = 0;
}
}The next code in the void main function, is an infinite
loop (using a while(1)) to check for the ADCC value, using an
“if” statement.
void main(void)
{
/* Initialize the device */
CLK_Initialize(); /* Oscillator Initialize function */
PPS_Initialize(); /* Peripheral select Initialize function */
PORT_Initialize(); /* Port Initialize function */
ADCC_Initialize(); /* ADCC Initialize function */
TMR2_Initialize(); /* TMR2 Initialize function */
TMR4_Initialize(); /* TMR4 Initialize function */
INTERRUPT_Initialize(); /* Interrupt Initialize function */
while (1)
{
if ((adcVal > DesiredThreshold)&&(adcVal < MaxThreshold))
{
/* turn LED0 ON by writing pin RE0 to low */
LATEbits.LATE0 = 0;
}
}
}This will check if the read value from the Potentiometer (POT Click) is between two values. If so, the LED0 will turn on without blinking with a frequency. The ADCC interrupt is triggered by TMR2 to complete a conversion at a frequency determined by the Timer2 Period.
1.6.11 Using TMR2 as Alternate SPI Clock
The Timer 2 peripheral can be used as an alternative clock for the MSSP peripheral and can be used in the SPI clock configuration.
For example, to create a 10 kHz SPI clock, modify the Timer Period to 50 µs. This corresponds to 20 kHz since the SPI uses TMR2output/2 as clock, meaning that 20 kHz / 2 = 10 kHz frequency.
The following code examples will present how to set up the TMR2 peripheral and be used as clock source for the SPI configured as Master communicating to two Slave devices, alternatively.
- System clock initialization
- TMR2 initialization
- SPI1 initialization
- PPS initialization
- Port initialization
- Slave control functions
- Data exchange function
1.6.11.1 MCC Generated Code
To generate this project using MPLAB Code Configurator (MCC) the next steps need to be followed:
- Create a new MPLAB X IDE project for PIC18F47Q10.
- Open the MCC from the toolbar (information about how to install the MCC plug-in can be found here).
- Go to Project Resources →
System → System Module and make the following configurations:
- Oscillator Select: HFINTOSC
- HF Internal Clock: 4 MHz
- Clock Divider: 1
- In the Watchdog Timer Enable field in the WWDT tab, WDT Disabled has to be selected
- In the Programming tab, Low-Voltage Programming Enable has to be checked
- From the Device Resources window, add
TMR2, MSSP1 and make the following configurations:
Timer2 Configuration:
- Enable Timer: checked
- Timer Clock tab
- Clock Source: HFINTOSC
- Clock Prescaler: 1:64
- Postscaler: 1:1
- Set 50 µs period in the Timer Period tab
MSSP1 Configuration:
- Serial Protocol: SPI
- Mode: Master
- SPI Mode: SPI Mode 0
- Input Data Sampled At: Middle
- Clock Source Selection: TMR2/2
- Actual Clock Frequency (Hz): 10000.00
- Open Pin Manager → Grid
View window, select UQFN40 in the MCU package field, and make the
following pin configurations:
- Set Port C pin 6 (RC6) as output for Slave Select 1 (SS 1)
- Set Port C pin 7 (RC7) as output for Slave Select 2 (SS 2)
The SCK, SDO and SDI pins appear alongside the MSSP1 peripheral and have their direction preset.
Figure 1-48. Pin Mapping 
- Click Pin Module in the Project
Resources and set the custom names SS pins:
- Rename RC6 to Slave1
- Rename RC7 to Slave2
- Click Generate in the Project Resources tab.
- In the
main.cfile generated by MCC, add the following code:- Control of Slave devices
- Data transmission
uint8_t writeData = 1; /* Data that will be transmitted */ uint8_t receiveData; /* Data that will be received */ void main(void) { // Initialize the device SYSTEM_Initialize(); while (1) { SPI1_Open(SPI1_DEFAULT); Slave1_SetLow(); receiveData = SPI1_ExchangeByte(writeData); Slave1_SetHigh(); SPI1_Close(); SPI1_Open(SPI1_DEFAULT); Slave2_SetLow(); receiveData = SPI1_ExchangeByte(writeData); Slave2_SetHigh(); SPI1_Close(); } }
1.6.11.2 Bare Metal Code
The first step will be to configure the microcontroller to disable the Watchdog Timer and to enable Low-Voltage Programming (LVP).
/* WDT operating mode->WDT Disabled */ #pragma config WDTE = OFF /* Low voltage programming enabled, RE3 pin is MCLR */ #pragma config LVP = ON
The internal oscillator has to be set to the desired value. This example uses the HFINTOSC with a frequency of 4 MHz. This translates in the following function:
static void CLK_init(void) { OSCCON1 = 0x60; /* set HFINTOSC Oscillator */ OSCFRQ = 0x02; /* set HFFRQ to 4 MHz */ }
The following function initializes the Timer2 peripheral with the HFINTOSC clock:
static void TMR2_Initialize(void)
{
/* TMR2 Clock source, HFINTOSC (00011) */
T2CLKCON = 0x03;
/* T2PSYNC Not Synchronized, T2MODE Software control, T2CKPOL Rising Edge */
T2HLT = 0x00;
/* TMR2ON on; T2CKPS Prescaler 1:1; T2OUTPS Postscaler 1:1 */
T2CON = 0x80;
/* Set TMR2 period, PR2 to 199 (50us) */
T2PR = Timer2Period;
/* Clear the TMR2 interrupt flag */
PIR4bits.TMR2IF = 0;
}The SPI1_Initialize function will configure the SPI clock
source to be TMR2 Output/2:
static void SPI1_Initialize(void) { /* SSP1ADD = 1 */ SSP1ADD = 0x01; /* Enable module, SPI Master Mode, TMR2 as clock source */ SSP1CON1 = 0x23; }
Therefore, the SPI pins can be relocated using the SSPxCLKPPS, SSPxDATPPS, SSPxSSPPS registers for the input channels and by using the RxyPPS registers for output channels.
The method to configure the location of the pins is independent of the application purpose and the SPI mode. Each microcontroller has its own default physical pin position for peripherals, but they can be changed using the Peripheral Pin Select (PPS).
For SPI1 in Master mode, only the SDI pin needs to be input so it is used with its default location RC4. SCK was mapped to RC3 and SDO was mapped to RC5. This translates into the following code:
static void PPS_Initialize(void) { RC3PPS = 0x0F; /* SCK channel on RC3 */ SSP1DATPPS = 0x14; /* SDI channel on RC4 */ RC5PPS = 0x10; /* SDO channel on RC5 */ }
Since this example has the Master sending data to two Slave devices, two SS pins are needed (SS1 and SS2). For both, a General Purpose Input/Output (GPIO) pin was used (RC6 for SS1 and RC7 for SS2).
| Channel | Pin |
|---|---|
| SCK | RC3 |
| SDI | RC4 |
| SDO | RC5 |
| SS1 | RC6 |
| SS2 | RC7 |
Since the Master devices control and initiate transmissions, the SDO, SCK and SS pins must be configured as output while the SDI channel will keep its default direction as input. The following example is based on the relocation of the SPI1 pins made above:
static void PORT_Initialize(void) { ANSELC = 0x07; /* Set RC6 and RC7 pins as digital */ TRISC = 0x17; /* Set SCK, SDO, SS1, SS2 as output and SDI as input */ }
A Master will control a Slave by pulling low the SS pin. If the Slave has set the direction of its SDO pin to output (when the SS pin is low), the SPI driver of the Slave will take control of the SDI pin of the Master, shifting data out from its Transmit Buffer register.
All Slave devices can receive a message, but only those with the SS pin pulled low can send data back. It is not recommended to enable more than one Slave in a typical connection since all of them will try to respond to the message and the Master has only one SDI channel. Therefore, the transmission will result in a write collision.
Before sending data, the user must pull low one of the configured SS signals to let the correspondent Slave device know it is the recipient of the message.
static void SPI1_slave1Select(void) { LATCbits.LATC6 = 0; /* Set SS1 pin value to LOW */ }
Once the user writes new data into the Buffer register, the hardware starts a new transfer, generating the clock on the line and shifting out the bits. The bits are shifted out starting with the Most Significant bit (MSb).
When the hardware finishes shifting all the bits, it sets the Buffer Full Status bit. The user must check the state of the flag before writing new data into the register by constantly reading the value of the bit (or polling), or else a write collision will occur.
static uint8_t SPI1_exchangeByte(uint8_t data) { SSP1BUF = data; while(!PIR3bits.SSP1IF) /* Wait until data is exchanged */ { ; } PIR3bits.SSP1IF = 0; return SSP1BUF; }
The user can pull the SS channel high if there is nothing left to transmit.
static void SPI1_slave1Deselect(void) { LATCbits.LATC6 = 1; /* Set SS1 pin value to HIGH */ }
int_main(void) and begins peripheral
initialization before the SPI commands are run in a infinite loop
while(1):
int main(void)
{
CLK_Initialize();
PPS_Initialize();
PORT_Initialize();
TMR2_Initialize();
SPI1_Initialize();
while(1)
{
SPI1_slave1Select();
receiveData = SPI1_exchangeByte(writeData);
SPI1_slave1Deselect();
SPI1_slave2Select();
receiveData = SPI1_exchangeByte(writeData);
SPI1_slave2Deselect();
}
}