32.6.3.8 Collision Detection
When the receiver and transmitter are connected either through pin configuration or externally, transmit collision can be detected after selecting the Collision Detection Enable bit in the CTRLB register (CTRLB.COLDEN = 1). To detect collision, the receiver and transmitter must be enabled (CTRLB.RXEN = 1 and CTRLB.TXEN = 1).
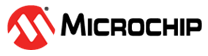
Collision detection is performed for each bit transmitted by comparing the received value with the transmit value, as illustrated in the following figure. While the transmitter is idle (no transmission in progress), characters can be received on RxD without triggering a collision.

The following figure illustrates the conditions for a collision detection. In this case, the Start bit and the first Data bit are received with the same value as transmitted. The second received Data bit is found to be different than the transmitted bit at the detection point, which indicates a collision.

- Abort the current transfer.
- Flush the transmit buffer.
- Disable transmitter (CTRLB.TXEN = 0)
- This is done after a synchronization delay. The CTRLB Synchronization Busy bit (SYNCBUSY.CTRLB) is set until this is complete.
- After disabling, the TxD pin is tri-stated.
- Set the Collision Detected bit (STATUS.COLL) along with the Error Interrupt Flag (INTFLAG.ERROR).
- Set the Transmit Complete Interrupt Flag (INTFLAG.TXC) because the transmit buffer no longer contains data.
After a collision, software must manually enable the transmitter again before continuing, after confirming that the CTRLB Synchronization Busy bit (SYNCBUSY.CTRLB) is not set.