4.3 Control Loops in FOC
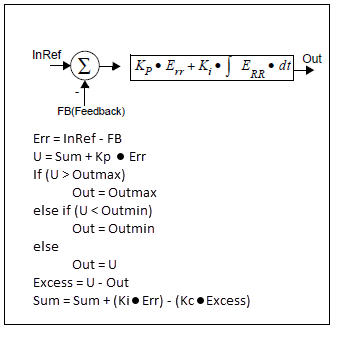
Three PI loops are used to control three interactive variables independently. The rotor speed, rotor flux and rotor torque are each controlled by a separate PI controller module. The implementation is conventional, and includes the term (Kc.Excess) to limit integral windup, as illustrated in the following figure. Excess is calculated by subtracting the unlimited output (U) and limited output (Out). The term Kc multiplies the Excess and limits the accumulated integral portion (Sum).