4.5 Application Example Using MPLAB Harmony v2 Driver
To create an application to display a message on a computer console using MPLAB
Harmony v2 drivers follow these steps:
- Create the MPLAB Harmony v2 project.
- Configure using the MHC.
- Configure the UART pin: Go to the Pin Setting window of the MHC and configure the UART Transmit pin.
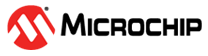
- Configure the USART
driver as shown in the figure below (notice the highlighted options are
modified):Note: In MPLAB Harmony, the driver corresponding to the UART and USART is the USART driver.
Figure 4-7. Configuring MPLAB Harmony v2 USART Driver
- Generate the code using the MHC.
- Follow these steps to update the
application:
- The UART initialization code is already generated by the MHC based on the configuration, as described in step 2.2, hence it does not required to be added.
- Update the
app.cfile andapp.hfile with application logic. The following figure shows the application logic to be developed in theapp.cfile, which has the following three states:- Open the driver: This state is required for the driver model which supports multiple clients. For example, the dynamic driver. It can be skipped for static drivers as they are single client.
- Queue transfer requests: This state adds the transfer request in the queue. In this application, there is no back-to-back requests to be queued, but a queueing model has been used for representation.
- Check status of
the transfer: This state checks the transfer status. The status
of the transfer can be checked by these methods:
- Polling: Application continuously polls for transfer status using an API. In this example the polling method is used.
- Callback: Callback can be registered using a dedicated API which can be called once the transfer completes.
uint8_t consoleMsg[] = "Hello World\n\r";
void APP_Tasks ( void )
{
/* Check the application's current state. */
switch ( appData.state )
{
/* Application's initial state. */
case APP_STATE_OPEN_DRIVER:
{
appData.myUSARTHandle = DRV_USART_Open(DRV_USART_INDEX_0, DRV_IO_INTENT_READWRITE|DRV_IO_INTENT_NONBLOCKING);
if (appData.myUSARTHandle != DRV_HANDLE_INVALID)
{
appData.state = APP_STATE_ADD_REQUEST;
}
break;
}
case APP_STATE_ADD_REQUEST:
{
DRV_USART_BufferAddWrite(appData.myUSARTHandle, &appData.bufferHandle, &consoleMsg[0], sizeof(consoleMsg));
appData.state = APP_STATE_STATUS_CHECK;
break;
}
case APP_STATE_STATUS_CHECK:
{
if (DRV_USART_TRANSFER_STATUS_TRANSMIT_EMPTY & DRV_USART_TransferStatus(appData.myUSARTHandle))
{
// Data has been transmitted, go to next state
appData.state = APP_STATE_COMPLETE;
}
break;
}Note: If the user wants to use a dynamic
driver or non-interrupt mode of a driver for this application, the application code in
the
app.c file must be the same. The only change is the MCC
configuration change, as described in the step 2.2.