6.12 CAN Transceiver
Controller Area Network (CAN) is a broadcast, differential serial bus standard typically used in the automotive industry. The CAN features high immunity to electromechanical noise and arbitration-free fixed priority.
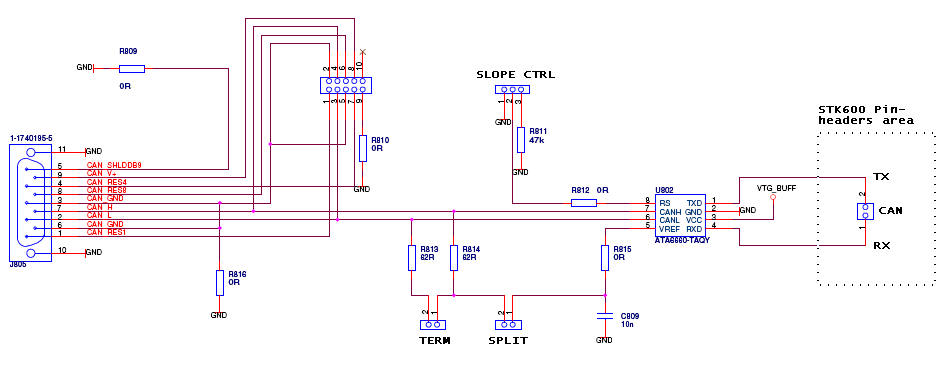
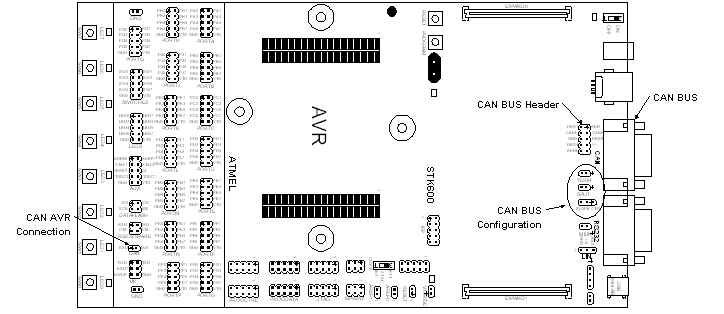
STK600 features the ATA6660 CAN transceiver. A male DB9 connector and a 10-pin header are provided for a bus connection.
If a network termination is needed (CAN baud rate higher than 100 kbps), the ̔TERMʼ jumper can be mounted to insert a 120Ω resistor between CAN-H and CAN-L.
̔SLOPE CTRLʼ is provided to adjust the CAN signal slopes and prevent unsymmetrical transients on the bus lines. The center pin on ̔SLOPE CTRLʼ is connected to the ATA6660 RS pin. This must be held below 0.87·VTG, which is the standby threshold voltage for AT6660.
Mount a jumper to either side of ̔SLOPE CTRLʼ to prevent AT6660 from going to standby.
The CAN transceiver is connected to the MCU through the two-pin (RX and TX) ̔CANʼ header near the switches on STK600. The target MCU can be any AVR device (bit-banging or USART), but more typically, it is one of the AT90CAN series, which supports the CAN protocol in hardware.