67.5.2.1 Output Driver AC Characteristics
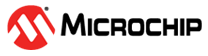
The following figure provides the timing definitions required to specify the maximum operating frequency of an output driver.
T: Period of the digital output signal
f = 1 / T: Frequency of the digital output signal
tHIGH: Time during which the output waveform is greater than VDD / 2
tLOW = T - tHIGH: Time during which the output waveform is less than VDD / 2
d = tHIGH / T: Output waveform duty cycle
VO: Output waveform amplitude
In Table 67-18 and Table 67-19, the maximum operating frequency fMAX guarantees that the driver’s output waveform fulfills the following characteristics:
- tR < 0.75 / fMAX and tF < 0.75 / fMAX
- d: the duty cycle of the output waveform is between 45% and 55%
- VO: the output waveform amplitude is greater than 95% VDD
The fMAX parameter indicates the speed limit of an output driver across various operating conditions: supply voltage range, load capacitance, drive strength and slewrate programming. The effective maximum output frequency of a specific output line may be limited by the peripheral that drives this line.
Table 67-18 and Table 67-19 provide the AC output characteristics of the output drivers in the following conditions:
- Output load: 10 pF capacitor to ground
- Two VDD ranges:
- 1.7V < VDD < 3.6V
- 3.0V < VDD < 3.6V
- Two Drive settings: 0 and 1
- Two Slewrate settings for the GPIO type: 0 and 1. The DDRIO drivers do not have slewrate settings and rather use an autocalibration setting.
For the GPIO drivers, the table below shows the recommended Drive and Slewrate settings depending on the output switching frequency and the two commonly used VDD ranges (1.8V and 3.3V). Other settings are possible but they may lead to excessively fast rise and fall times (tR, tF), with a potentially negative impact on the electromagnetic emissions of the application.
| VDD Range | Low-Speed (fGPIO < 50 MHz)(1) | High-Speed (fGPIO ≥ 50 MHz) |
|---|---|---|
| 1.7V – 1.9V | Drive = 1, Slewrate = 1 | Drive = 1, Slewrate = 0 |
| 3.0V – 3.6V | Drive = 0, Slewrate = 1 | Drive =0, Slewrate = 0 |
- Indicative value. See Table 67-18 and Table 67-19 for accurate maximum frequency specifications.
| Symbol | Parameters | Conditions | Min | Max | Unit | |
|---|---|---|---|---|---|---|
| tR / tF | Rise or fall time(1)(2) | GPIO | Drive = 0, Slewrate = 0 | 1.5 | 5.1 | ns |
| Drive = 1, Slewrate = 0 | 1.4 | 4.8 | ns | |||
| Drive = 0, Slewrate = 1 | 4.1 | 10.3 | ns | |||
| Drive = 1, Slewrate = 1 | 2.1 | 7.0 | ns | |||
| fMAX | Maximum frequency(2)(3)(4) | GPIO | Drive = 0, Slewrate = 0 | 95 | – | MHz |
| Drive = 1, Slewrate = 0 | 135 | – | MHz | |||
| Drive = 0, Slewrate = 1 | 25 | – | MHz | |||
| Drive = 1, Slewrate = 1 | 50 | – | MHz | |||
- Measured between VO = 10% VDD and VO = 90% VDD
- Simulation data
- fMAX = 0.75 / (tR+tF). Frequency numbers are rounded for legibility.
- fMAX may be limited by the peripheral that drives the I/O line.
| Symbol | Parameter | Conditions | Min | Max | Unit | |
|---|---|---|---|---|---|---|
| tR or tF | Rise or fall time(1)(2) | GPIO | Drive = 0, Slewrate = 0 | 1.5 | 2.9 | ns |
| Drive = 1, Slewrate = 0 | 1.4 | 2.7 | ns | |||
| Drive = 0, Slewrate = 1 | 4.0 | 7.0 | ns | |||
| Drive = 1, Slewrate = 1 | 2.2 | 4.0 | ns | |||
| fMAX | Maximum frequency(2)(3)(4) | Drive = 0, Slewrate = 0 | 90 | – | MHz | |
| Drive = 1, Slewrate = 0 | 130 | – | MHz | |||
| Drive = 0, Slewrate = 1 | 25 | – | MHz | |||
| Drive = 1, Slewrate = 1 | 50 | – | MHz | |||
- Measured between VO = 10% VDD and VO = 90% VDD
- Simulation data
- fMAX = 0.75 / (tR+tF). Frequency numbers are rounded for legibility.
- fMAX may be limited by the peripheral that drives the I/O line.