2.6 Using a USART/UART
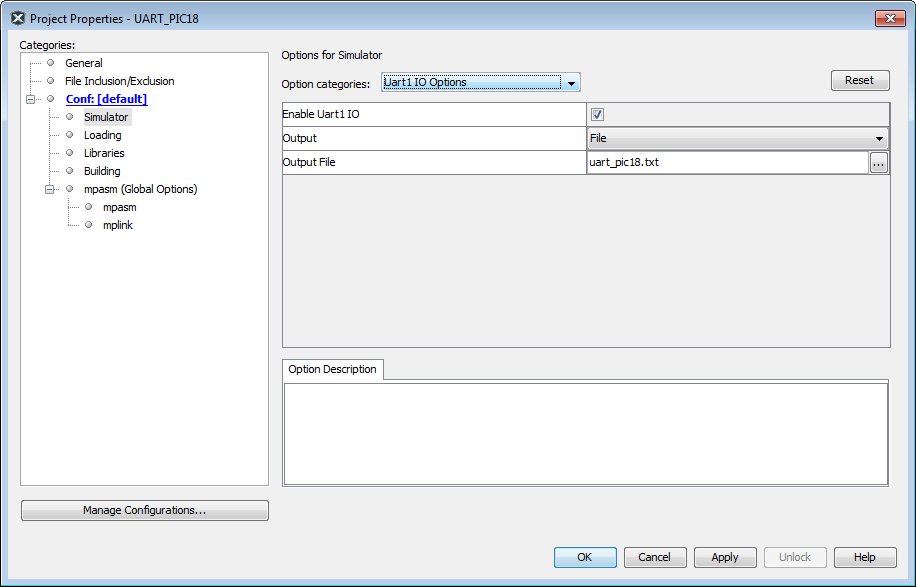
For devices that have a USART or UART peripheral, USART/UART simulation may be enabled using File>Project Properties, “Simulator” category, “UART1 IO Options” option category. For more on this category, see Simulator Options Selection.
For an example of simulating USART/UART operation, see below.
PIC18F MCU USART Example – Setup
Follow the steps below to set up the example.
- Get Example Code: Example code
for demonstrating USART operation in the simulator is based on code found on the
Microchip website under “PICDEM™ 2 example code” as “USART demo for the 18CXXX”
(
usart.asm). The updated code (usart2.asm) is listed in the code at the end of the example. - Create a Project: In MPLAB X IDE, use the Project Wizard to create a project.
- Select “Microchip Embedded”, “Standalone Project”.
- Select PIC18F452 as the device.
- Select the Simulator as the “hardware” tool.
- Select “mpasm” as the active toolchain.
- Place the project in its own folder and name the project “usart”.
- Add Source File: Add the file
usart2.asmto the project:- Right click on “Source File” in the project tree and select
New>Other. In the “New File” window, click the “Assembler”
category, select “AssemblyFile.asm” and click Next. Name the file
usart2.asmand click Finish. The new file will appear in the project tree and open in an Editor window. Paste in the example code and save the file. - Right click on “Source File” in the project tree and “Add Existing Item” if you have already created the file outside of MPLAB X IDE.
- Right click on “Source File” in the project tree and select
New>Other. In the “New File” window, click the “Assembler”
category, select “AssemblyFile.asm” and click Next. Name the file
- Check Assembler Location: Make sure the paths to the language tool executables are correct (see the Tools>Options, Embedded button, Build Tools tab.)
- Build the Project: Right click on the project name in the project tree and select “Build”. Build results are displayed in the Output window. Fix any reported errors.
PIC18F MCU USART Example – Register Injection
To use register injection:
- Enable the UART:
- Right click on your project and select “Properties”.
- Click on the “Simulator” category and select the option category “Uart1 IO Options”.
- Check “Enable Uart1 IO”.
- For “Output”, select “Window”.
- Click Apply.
- Select Window>Simulator>Stimulus.
- Click the “Register Injection” tab.
- Under “Reg/Var”, select the UART receive register (e.g., RCREG or RXBUF), depending on your device.
- Under “Trigger, select “Message”.
- Select File>New File, “Other” category, “Empty File” file type and
click Next. Name the file “input.txt” and click Finish. Enter the following into
the file in the editor and then select
File>Save.
wait 4 ms “Microchip” - Under “Data Filename”, enter the name of the file in the previous step.
- Under “Format”, choose “Pkt”.
- Debug Run the program. The injected output will be displayed in the Output window, “UART 1 Output” tab.
Updated PICDEM 2 Example Code
;
; Software License Agreement
;
; The software supplied herewith by Microchip Technology Incorporated
; (the “Company”) for its PIC(R) Microcontroller is intended and
; supplied to you, the Company’s customer, for use solely and
; exclusively on Microchip PIC Microcontroller products. The
; software is owned by the Company and/or its supplier, and is
; protected under applicable copyright laws. All rights are reserved.
; Any use in violation of the foregoing restrictions may subject the
; user to criminal sanctions under applicable laws, as well as to
; civil liability for the breach of the terms and conditions of this
; license.
;
; THIS SOFTWARE IS PROVIDED IN AN “AS IS” CONDITION. NO WARRANTIES,
; WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT NOT LIMITED
; TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A
; PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. THE COMPANY SHALL NOT,
; IN ANY CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL OR
; CONSEQUENTIAL DAMAGES, FOR ANY REASON WHATSOEVER.
;
;***********************************************************
; PIC18F452 EXAMPLE CODE FOR PICDEM 2
;
; TITLE: USART Demonstration
; FILENAME: usart.asm
; REVISION HISTORY: A 05/13/00 jb format change
; B 02/28/05 em update for example
; C 10/16/14 em disable WDT
; HARDWARE: PICDEM 2 board
; FREQUENCY: 4MHz
;
;************************************************************
; This program demonstrates basic functionality of the USART.
;
; Port B is connected to 8 LEDs.
; When the PIC18F452 receives a word of data from
; the USART, the value is displayed on the LEDs and
; is retransmitted to the host computer.
;
; Set terminal program to 9600 baud, 1 stop bit, no parity
list p=18f452 ; set processor type
list n=0 ; suppress page breaks in list file
include <p18f452.inc>
; Turn off Watchdog Timer
config WDT=OFF
;************************************************************
; Reset and Interrupt Vectors
org 00000h ; Reset Vector
goto Start
org 00008h ; Interrupt vector
goto IntVector
;************************************************************
; Program begins here
org 00020h ; Beginning of program EPROM
Start
clrf LATB ; Clear PORTB output latches
clrf TRISB ; Config PORTB as all outputs
bcf TRISC,6 ; Make RC6 an output
movlw 19h ; 9600 baud @4MHz
movwf SPBRG
bsf TXSTA,TXEN ; Enable transmit
bsf TXSTA,BRGH ; Select high baud rate
bsf RCSTA,SPEN ; Enable Serial Port
bsf RCSTA,CREN ; Enable continuous reception
bcf PIR1,RCIF ; Clear RCIF Interrupt Flag
bsf PIE1,RCIE ; Set RCIE Interrupt Enable
bsf INTCON,PEIE ; Enable peripheral interrupts
bsf INTCON,GIE ; Enable global interrupts
;************************************************************
; Main loop
Main
goto Main ; loop to self doing nothing
;************************************************************
; Interrupt Service Routine
IntVector
; save context (WREG and STATUS registers) if needed.
btfss PIR1,RCIF ; Did USART cause interrupt?
goto OtherInt ; No, some other interrupt
movlw 06h ; Mask out unwanted bits
andwf RCSTA,W ; Check for errors
btfss STATUS,Z ; Was either error status bit set?
goto RcvError ; Found error, flag it
movf RCREG,W ; Get input data
movwf LATB ; Display on LEDs
movwf TXREG ; Echo character back
goto ISREnd ; go to end of ISR, restore context, return
RcvError
bcf RCSTA,CREN ; Clear receiver status
bsf RCSTA,CREN
movlw 0FFh ; Light all LEDs
movwf PORTB
goto ISREnd ; go to end of ISR, restore context, return
OtherInt
goto $ ; Find cause of interrupt and service it
; before returning from interrupt. If not,
; the same interrupt will re-occur
; as soon as execution returns to
; the interrupted program.
ISREnd
; Restore context if needed.
retfie
end