74.6.2.1 Output Driver AC Characteristics
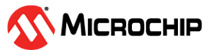
The timing definitions necessary to specify the maximum operating frequency of an output driver are provided in the following figure.
tSIG: Period of the digital output signal
f = 1 / tSIG: Frequency of the digital output signal
tHIGH: Time during which the output waveform is greater than VDD / 2
tLOW = tSIG - tHIGH: Time during which the output waveform is less than VDD / 2
d = tHIGH / tSIG: Output waveform duty cycle
VO: Output waveform amplitude
- tR < 0.75 / fMAX and tF < 0.75 / fMAX
- d: the duty cycle of the output waveform is between 45% and 55%
- VO: the output waveform amplitude is greater than 95% VDD
The fMAX parameter indicates the speed limit of an output driver across various operating conditions: supply voltage range, load capacitance, drive strength programming. The effective maximum output frequency of a specific output line may be limited by the peripheral that drives this line. Conversely, higher output switching speeds may be achieved under different load conditions. Microchip recommends to perform an electrical simulation of the critical interfaces (GMAC, SDMMC, QSPI, etc.) with the provided IBIS models.
- Output load: 10 pF capacitor to ground
- Two VDD ranges:
- 1.7V < VDD < 1.9V and
- 3.0V < VDD < 3.6V
- Two Drive settings: 0 and 1, and
- Two Slewrate settings for the GPIO type: 0 and 1.
For the GPIO drivers, the following table provides the recommended drive and slewrate settings depending on the output switching frequency and the two commonly used VDD ranges (1.8V and 3.3V). Other settings are possible but they may lead to excessively fast rise and fall times (tR, tF), with a potentially negative impact on the electromagnetic emissions of the application.
| VDD Range | Low Speed fGPIO ≤ 50 MHz(1) |
High Speed 50 MHz ≤ fGPIO ≤ 170 MHz(1) |
|---|---|---|
| 1.7V - 1.9V | Drive = 1, Slewrate = 1 | Drive = 1, Slewrate = 0 |
| 3.0V - 3.6V | Drive = 0, Slewrate = 1 | Drive = 0, Slewrate = 0 |
- This is an indicative value. See Table 74-21 and Table 74-22 for accurate maximum frequency specifications.
For the HSIO drivers (used in SDMMCx and QSPI0 peripherals), the following table provides their nominal output impedance with respect to the Drive settings. These drivers do not have a Slewrate setting but are rather calibrated against an external 1% resistor mounted on the SDMMCx_CAL or QSPI0_CAL pins. Depending on the target signal frequency and the external load, it is possible adjust their target output impedance.
| VDD Range | Drive = 00 (Type D) | Drive = 01 (Type A) | Drive = 10 (Type C) | Drive = 11 (Type B) | Unit |
|---|---|---|---|---|---|
| 1.7V – 1.9V(1) | 100 | 33 | 66 | 50 | Ω |
| 3.0V – 3.6V(2) | 84 | 28 | 56 | 42 | Ω |
- For SDMMC lines in UHS I mode in 1.8V, the drive is controlled in the SDMMC user interface. In this case, drive configurations in PIO registers have no effect.
- In the 3.3V range, only the Drive = 00 (Type D) settings are recommended. Other configurations may lead to excessively fast rise and fall times. Microchip provides IBIS models to perform an electrical simulation of these QSPI an SDMMC interfaces.
| Symbol | Parameter | I/O Type | Conditions | Min | Max | Unit |
|---|---|---|---|---|---|---|
| tR or tF | Rise or fall time(1)(2) | GPIO | Drive = 0, Slewrate = 0 | 1.5 | 5.1 | ns |
| Drive = 1, Slewrate = 0 | 1.4 | 4.8 | ns | |||
| Drive = 0, Slewrate = 1 | 4.1 | 12.3 | ns | |||
| Drive = 1, Slewrate = 1 | 2.1 | 7.0 | ns | |||
| HSIO | Drive = 11 (Type B) | 1.6 | 1.8 | ns | ||
| Drive = 01 (Type A) | 1.1 | 1.25 | ns | |||
| Drive = 10 (Type C) | 2.2 | 2.3 | ns | |||
| Drive = 00 (Type D) | 3.3 | 3.4 | ns | |||
| PIOBU | – | 1.0 | 4.0 | ns | ||
| fMAX | Maximum frequency(2)(3) | GPIO | Drive = 0, Slewrate = 0 | 95 | – | MHz |
| Drive = 1, Slewrate = 0 | 135 | – | MHz | |||
| Drive = 0, Slewrate = 1 | 25 | – | MHz | |||
| Drive = 1, Slewrate = 1 | 50 | – | MHz | |||
| HSIO | Drive = 11 (Type B) | 125 | – | MHz | ||
| Drive = 01 (Type A)(4) | 150 | – | MHz | |||
| Drive = 10 (Type C) | 100 | – | MHz | |||
| Drive = 00 (Type D) | 70 | – | MHz | |||
| PIOBU | – | 25 | – | MHz |
- Measured between VO = 10% VDD and VO= 90% VDD
- Simulation data
- fMAX may be limited by the peripheral that drives the I/O line.
- 200 MHz operation can be achieved with different load conditions. It is recommended to perform an electrical simulation with the provided IBIS models.
| Symbol | Parameter | I/O Type | Conditions | Min | Max | Unit |
|---|---|---|---|---|---|---|
| tR or tF | Rise or fall time(1)(2) | GPIO | Drive = 0, Slewrate = 0 | 1.5 | 2.9 | ns |
| Drive = 1, Slewrate = 0 | 1.4 | 2.7 | ns | |||
| Drive = 0, Slewrate = 1 | 4.0 | 7.0 | ns | |||
| Drive = 1, Slewrate = 1 | 2.2 | 4.0 | ns | |||
| HSIO | Drive = 11 (Type B) | 1.3 | 1.5 | ns | ||
| Drive = 01 (Type A) | 0.9 | 1.0 | ns | |||
| Drive = 10 (Type C) | 1.7 | 1.9 | ns | |||
| Drive = 00 (Type D) | 2.6 | 2.9 | ns | |||
| PIOBU | – | 1.0 | 3.0 | ns | ||
| fMAX | Maximum frequency(2)(3) | GPIO | Drive = 0, Slewrate = 0 | 150 | – | MHz |
| Drive = 1, Slewrate = 0 | 170 | – | MHz | |||
| Drive = 0, Slewrate = 1 | 50 | – | MHz | |||
| Drive = 1, Slewrate = 1 | 75 | – | MHz | |||
| HSIO | Drive = 11 (Type B) | 125 | – | MHz | ||
| Drive = 01 (Type A) | 150 | – | MHz | |||
| Drive = 10 (Type C) | 100 | – | MHz | |||
| Drive = 00 (Type D) | 70 | – | MHz | |||
| PIOBU | – | 40 | – | MHz |
- Measured between VO = 10% VDD and VO= 90% VDD
- Simulation data
- fMAX may be limited by the peripheral that drives the I/O line.