17.5.1.2 Six-Step Commutation – PWM Scheme 2
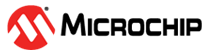
In this PWM scheme, three switches are used to control the two active phases. In a given sector, one active phase is driven with a complementary PWM waveform and the other active phase has only its low side driven low at 100% duty cycle, as shown in Figure 17-41. Like Scheme 1, overrides are used to control the outputs in each sector.
In this scheme, Complementary Output mode is used and overridden as needed in each sector. The same three-phase host/client synchronization technique is used as in Scheme 1.
Configuration Summary:
- Independent Edge PWM mode
- Complementary Output mode
- Master Period and Duty Cycle Used
- Override State is Dependent on Sector State
- Dead time is applied to the Complementary PWM Signal
Six-Step PWM Scheme 2 Code
#include<stdint.h>
//For delay function
#define FCY 8000000 //CPU frequency in Hz
#include "libpic30.h"
void PWMInitialization(void);
#define H_ACTIVE_L_ACTIVE 0x000C0000
//PGxIOCONbits.PMOD = 0b00 -- Complementary output mode
//PGxIOCONbits.PENH = 1 -- PWM generator x controls PWMxH pin
//PGxIOCONbits.PENL = 1 -- PWM generator x controls PWMxL pin
//PGxIOCONbits.OVRENH = 0 -- Override not enabled on PWMxH pin
//PGxIOCONbits.OVRENL = 0 -- Override not enabled on PWMxL pin
#define H_LOW_L_HIGH 0x000C3400
//PGxIOCONbits.PMOD = 0b00 -- Complementary output mode
//PGxIOCONbits.PENH = 1 -- PWM generator x controls PWMxH pin
//PGxIOCONbits.PENL = 1 -- PWM generator x controls PWMxL pin
//PGxIOCONbits.OVRENH = 1 -- Override enabled on PWMxH pin
//PGxIOCONbits.OVRENL = 1 -- Override enabled on PWMxL pin
//PGxIOCONbits.OVRDAT = 0b01 -- PWMxH pin overridden high, PWMxL pin overridden low
#define H_LOW_L_LOW 0x000C3000
//PGxIOCONbits.PMOD = 0b00 -- Complementary output mode
//PGxIOCONbits.PENH = 1 -- PWM generator x controls PWMxH pin
//PGxIOCONbits.PENL = 1 -- PWM generator x controls PWMxL pin
//PGxIOCONbits.OVRENH = 1 -- Override enabled on PWMxH pin
//PGxIOCONbits.OVRENL = 1 -- Override enabled on PWMxL pin
//PGxIOCONbits.OVRDAT = 0b00 -- PWMxH pin overridden low, PWMxL pin overridden low
uint16_t state = 0;
uint32_t PWM1State[6] = {H_ACTIVE_L_ACTIVE, H_LOW_L_LOW, H_LOW_L_HIGH, H_LOW_L_HIGH, H_LOW_L_LOW, H_ACTIVE_L_ACTIVE};
uint32_t PWM2State[6] = {H_LOW_L_LOW, H_ACTIVE_L_ACTIVE, H_ACTIVE_L_ACTIVE, H_LOW_L_LOW, H_LOW_L_HIGH, H_LOW_L_HIGH};
uint32_t PWM3State[6] = {H_LOW_L_HIGH, H_LOW_L_HIGH, H_LOW_L_LOW, H_ACTIVE_L_ACTIVE, H_ACTIVE_L_ACTIVE, H_LOW_L_LOW};
//Sector 1:
//PWM1 has complementary outputs, both controlled by the PWM generator.
//PWM2 has both outputs overridden to low.
//PWM3 has High output overridden to low, Low output overridden to high.
//Sector 2:
//PWM1 has both outputs overridden to low.
//PWM2 has complementary outputs, both controlled by the PWM generator.
//PWM3 has High output overridden to low, Low output overridden to high.
//Sector 3:
//PWM1 has High output overridden to low, Low output overridden to high.
//PWM2 has complementary outputs, both controlled by the PWM generator.
//PWM3 has both outputs overridden to low.
//Sector 4:
//PWM1 has High output overridden to low, Low output overridden to high.
//PWM2 has both outputs overridden to low.
//PWM3 has complementary outputs, both controlled by the PWM generator.
//Sector 5:
//PWM1 has both outputs overridden to low.
//PWM2 has High output overridden to low, Low output overridden to high.
//PWM2 has complementary outputs, both controlled by the PWM generator.
//Sector 6:
//PWM1 has complementary outputs, both controlled by the PWM generator.
//PWM2 has High output overridden to low, Low output overridden to high.
//PWM3 has both outputs overridden to low.
void Delay() {
__delay_us(50); //Delay 5 PWM cycles
}
int main()
{
//Initialize PWM module
PWMInitialization();
while(1)
{
for(state = 0; state < 6; state++)
{
//Delay is used to simulate BLDC commutation.
//In practical application, commutation state transition will be based on feedback from Motor.
Delay();
PG1IOCON = PWM1State[state];
PG2IOCON = PWM2State[state];
PG3IOCON = PWM3State[state];
}
}
}
void PWMInitialization(void)
{
//Ensure PWM Generators 1-3 are disabled before configuring
PG1CONbits.ON = 0;
PG2CONbits.ON = 0;
PG3CONbits.ON = 0;
//Set PWM master clock to 400MHz from PLL2 through CLKGEN5
configure_PLL2_Fout_400MHz();
clock_PWM_from_PLL2_Fout();
//Set PWM Period -- 100kHz given a 400MHz PWM master clock
MPERbits.MPER = (4000 << 4); //Time base units are 1/16 of a PWM clock
//Set Duty Cycle-- 25%
MDCbits.MDC = (2000 << 4);
//Set Phase shift - No phase shift
MPHASEbits.MPHASE = 0;
PG1CONbits.MDCSEL = 1; //Select MDC as PWM Generator 1's Duty Cycle Register
PG1CONbits.MPERSEL = 1; //Select MPER as PWM Generator 1's Period Register
PG1CONbits.MPHSEL = 1; //Select MPHASE as PWM Generator 1's Phase Register
//PWM Generator broadcasts software set of UPDREQ control bit and EOC signal to other PWM Generators
PG1CONbits.MSTEN = 1;
PG1CONbits.UPDMOD = 0b000; //PWM Buffer Update Mode is at start of next PWM cycle if UPDREQ = 1
PG1CONbits.TRGMOD = 0b00; //PWM generator operates in Single Trigger Mode
PG1CONbits.SOCS = 0b0000; //Start of Cycle is local EOC
PG1CONbits.CLKSEL = 0b01; //PWM Generator uses PWM Master Clock, undivided and unscaled
PG1CONbits.MODSEL = 0b000; //PWM Generator operates in Independent Edge PWM mode
PG1IOCONbits.PMOD = 0b00; //PWM Generator 1 Output Mode is Complementary Mode
PG1IOCONbits.PENH = 1; //PWM Generator 1 controls the PWM1H output