3.2.26 DIAG_TC
The DIAG_TC module is designed to verify the correct functionality of the Timer Controller (TC) through a set of C function calls.
The DIAG_TC software test API is mapped to the following safety mechanisms:
| Function | Diagnostic Mechanism | UseCase | Elasped Timer (μs) ~ |
|---|---|---|---|
| DIAG_TC_Disable() | TC_DISABLE | POST / OnDemand | 18 |
| DIAG_TC_DMA() | TC_DMA | POST / OnDemand | 11.22 |
| DIAG_TC_Enable() | TC_ENABLE | POST / OnDemand | 33 |
| DIAG_TC_Interrupts() |
TC_INTERRUPTS | POST | 49.20 |
| DIAG_TC_RedundantTimer() | TC_REDUNDANT_TIMER | POST / OnDemand | 45.62 |
| DIAG_TC_SFRReset() | SFR_RESET | POST | 52 |
| DIAG_TC_SFRWriteRead() | SFR_WRITE_READ | POST / OnDemand | 69 |
| DIAG_TC_SyncBusy() | TC_SYNCBUSY | POST / OnDemand | 20.32 |
#define TC_HW_LOOP_CNTR 0xF0U
#define TC_MAX_CLOCKS_DIFF 0x5U
typedef enum
{
DISABLE = 0,
TC0_OVF = 0x1B,
TC1_OVF = 0x1E,
TC2_OVF = 0x21,
TCC0_OVF = 0x10,
TCC1_OVF = 0x15,
TCC2_OVF = 0x18,
}DIAG_DMA_TRIGGER_SRC;
typedef enum diag_tc_nums
{
DIAG_TC0_NUM = 0,
DIAG_TC1_NUM = 1,
DIAG_TC2_NUM = 2,
DIAG_TC_MAX = 3,
}DIAG_TC_NUMBERS;
typedef enum diag_tc_periphs
{
DIAG_TC0_PERIPH = 1<<DIAG_TC0_NUM,
DIAG_TC1_PERIPH = 1<<DIAG_TC1_NUM,
DIAG_TC2_PERIPH = 1<<DIAG_TC2_NUM,
}DIAG_TC_PERIPHS;
typedef struct
{
bool ovf_set;
bool ovf_clrd;
bool cb;
}tc_int_status;
#define DIAG_TC_PERIPHS_CHECK_VALUE ((uint32_t)DIAG_TC0_PERIPH | (uint32_t)DIAG_TC1_PERIPH | (uint32_t)DIAG_TC2_PERIPH)
// *****************************************************************************
// *****************************************************************************
// Section: Data Types
// *****************************************************************************
// *****************************************************************************
// TC0<->TCC0 variables
extern uint32_t tc0_cntr, tc0_curr_cntr, tc0_prev_cntr, tcc0_cntr, tcc0_curr_cntr;
extern uint32_t tcc0_prev_cntr, tc0_tcc0_curr_diff, tc0_tcc0_prev_diff;
// TC0 interrupt status
extern tc_int_status tc0_ints;
// TC1<->TCC1 variables
extern uint32_t tc1_cntr, tc1_curr_cntr, tc1_prev_cntr, tcc1_cntr, tcc1_curr_cntr;
extern uint32_t tcc1_prev_cntr, tc1_tcc1_curr_diff, tc1_tcc1_prev_diff;
// TC1 interrupt status
extern tc_int_status tc1_ints;
// TC2<->TCC2 variables
extern uint32_t tc2_cntr, tc2_curr_cntr, tc2_prev_cntr, tcc2_cntr, tcc2_curr_cntr;
extern uint32_t tcc2_prev_cntr, tc2_tcc2_curr_diff, tc2_tcc2_prev_diff;
// TC2 interrupt status
extern tc_int_status tc2_ints;
Configuring the Diagnostic
DIAG_TC does not require additional configuration.
Configuring the System
Run-time Pre-requisites
DIAG_DIAG_TC_SFRWriteRead should be executed before DIAG_TC_SyncBusy, DIAG_TC_DMA and DIAG_TC_RedundantTimer
Using the Diagnostic
#include "definitions.h"
DIAG_TEST_STATUS DIAG_TC_SFRPost ( DIAG_TC_PERIPHS tc_periph )
{
DIAG_TEST_STATUS result;
result = DIAG_TC_SFRReset(tc_periph,NULL,0,false);
if (result == DIAG_TEST_PASSED)
{
result = DIAG_TC_SFRWriteRead(tc_periph,NULL,0,false);
}
return result;
}
DIAG_TEST_STATUS DIAG_TC_Post ( DIAG_TC_PERIPHS tc_periph )
{
DIAG_TEST_STATUS result;
result = DIAG_TC_Enable( tc_periph );
if( result == DIAG_TEST_PASSED )
{
result = DIAG_TC_Disable( tc_periph );
if( result == DIAG_TEST_PASSED )
{
result = DIAG_TC_SyncBusy( tc_periph );
if( result == DIAG_TEST_PASSED )
{
result = DIAG_TC_Interrupts( tc_periph );
if( result == DIAG_TEST_PASSED )
{
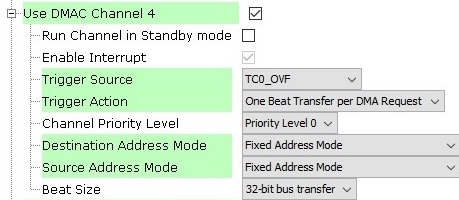
result = DIAG_TC_DMA( tc_periph, DMAC_CHANNEL_4 ); // must match DMA channel set up in MCC
if( result == DIAG_TEST_PASSED )
{
result = DIAG_TC_RedundantTimer( tc_periph );
}
}
}
}
}
return result;
}