11.2.2 Transmit Procedures
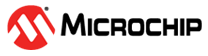
The CAN controller provides 32 transmit message holding buffers. An internal priority arbiter selects the message according to the chosen arbitration scheme. Upon transmission of a message or message arbitration loss, the priority arbiter re-evaluates the message priority of the next message. The following figure gives an overall view of the transmit message buffers.
Two types of message priority arbitration are supported. The type of arbitration is selected using the configuration register. Following are the arbitration types:
- Round Robin: Buffers are served in a defined order: 0-1-2... 31-0-1... A particular buffer is only selected if its TxReq flag is set. This scheme guarantees that all buffers receive the same probability to send a message.
- Fixed Priority: Buffer 0 has the highest priority. This way it is
possible to designate buffer 0 as the buffer for error messages and it is ensured that
they are sent first.Important: RTR message requests are served before transmit message buffers are handled. For example, RTRreq0, RTRreq31, TxMessage0, TxMessage1, and TxMessage31.